Opas PIC16F877A: n käyttämiseen askelmoottoriprojekteihin
PIC16F877A -mikrokontrolleria käytetään laajasti monissa elektronisissa projekteissa, koska se tarjoaa hyvän tasapainon ominaisuuksista ja helppokäyttöisyydestä.Tässä oppaassa tarkastellaan tarkkaan PIC16F877A: ta, joka kattaa kaiken sen pinoutista ja CAD -malleista sen käyttöön Stepper -moottorien hallinnassa.Rakennatko yksinkertaista laitetta tai monimutkaista automaatioprojektia, tämän mikrokontrollerin käyttämisen käyttö- ja ohjausmoottorien ymmärtäminen auttaa sinua saamaan parhaat tulokset.
Luettelo

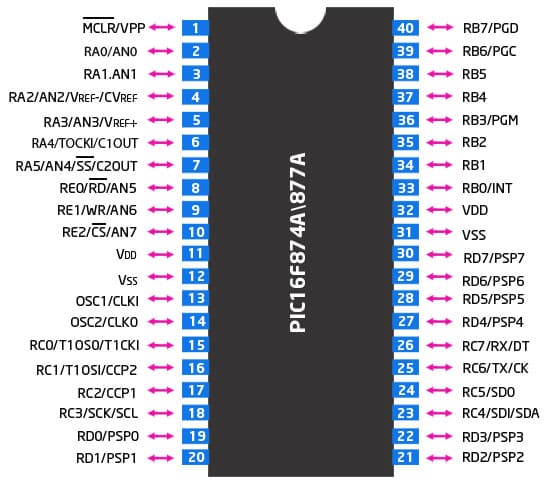
PIC16F877A PIN -ASENNUS
CAD -mallit PIC16F877A: lle
PIC16F877A Kaavio -symboli
PIC16F877A PCB Jalanjälki

3D -malli
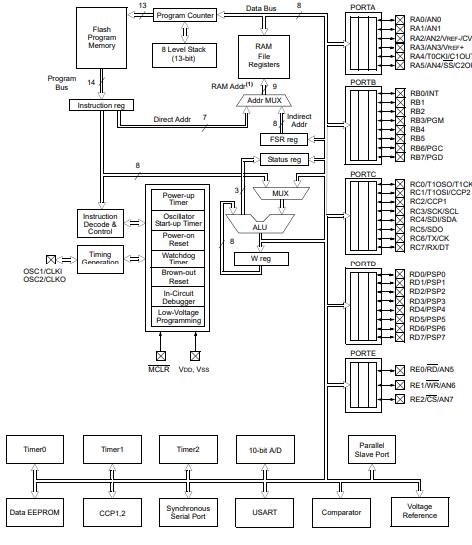
PIC16F877A Sisäinen rakenne
Yksityiskohtaiset tekniset eritelmät
| Tyyppi | Parametri |
| Tehtaan läpimenoaika | 7 viikkoa |
| Asentaa | Reiän läpi |
| Asennustyyppi | Reiän läpi |
| Paketti / kotelo | 40-DIP (0,600, 15,24 mm) |
| Nastat | 40 |
| Tietomuuntimet | A/D 8X10B |
| I/OS: n lukumäärä | 33 |
| Tarkkailuajastimet | Kyllä |
| Käyttölämpötila | -40°C ~ 85°C ta |
| Pakkaus | Putki |
| Sarja | KUVA® 16F |
| Julkaistu | 1997 |
| JESD-609-koodi | E3 |
| Pbfree -koodi | Kyllä |
| Osien tila | Aktiivinen |
| Kosteuden herkkyystaso (MSL) | 1 (rajoittamaton) |
| Päätteiden lukumäärä | 40 |
| ECCN -koodi | Ear99 |
| Terminaalipinta | Matte -tina (SN) - hehkutettu |
| Lisäominaisuus | Toimii 4 V: n vähimmäistoimituksella |
| Terminaalin sijainti | Kaksois- |
| Toimitusjännite | 5V |
| Taajuus | 20MHz |
| Perusosanumero | Pic16f877a |
| Nastaluku | 40 |
| Syöttöjännite-Max (VSUP) | 5,5 V |
| Virtalähteet | 5V |
| Syöttöjännite-min (VSUP) | 4,5 V |
| Rajapinta | I2C, SPI, SSP, UART, USART |
| Muistin koko | 14 kt |
| Oskillaattorityyppi | Ulkoinen |
| Nimellinen toimitusvirta | 1,6maa |
| Ram -kokoinen | 368 x 8 |
| Jännite - Syöttö (VCC/VDD) | 4V ~ 5,5 V |
| UPS/UCS/Perifeerinen ICS -tyyppi | Mikrokontrolleri, RISC |
| Ydinprosessori | KUVA |
| Oheislaitteet | Ruskea-out havaitsee/nollaa, POR, PWM, WDT |
| Ohjelmamuistityyppi | Salama |
| Ydinkoko | 8-bittinen |
| Ohjelman muistin koko | 14 kt (8k x 14) |
| Liitettävyys | I2C, SPI, UART/USART |
| Bittikoko | 8 |
| Pääsyaika | 20 µs |
| On ADC | Kyllä |
| DMA -kanavat | Ei |
| Tietoväylän leveys | 8b |
| Ajastimien lukumäärä | 3 |
| Osoiteväylän leveys | 8b |
| Tiheys | 112 kb |
| EEPROM -koko | 256 x 8 |
| CPU -perhe | KUVA |
| ADC -kanavien lukumäärä | 8 |
| PWM -kanavien lukumäärä | 2 |
| I2C -kanavien lukumäärä | 1 |
| Korkeus | 4,06 mm |
| Pituus | 52,45 mm |
| Leveys | 14,22 mm |
| Saavuttaa SVHC: n | Ei svhc |
| Säteilykovettuminen | Ei |
| ROHS -tila | ROHS3 -yhteensopiva |
| Lyijyvapaa | Lyijyvapaa |
Stepper -moottorien ymmärtäminen
Askelmoottori on eräänlainen sähkömoottori, joka liikkuu tietyissä vaiheissa eikä jatkuvassa liikkeessä, kuten perinteiset moottorit.Nämä vaiheittaiset liikkeet mitataan asteina, jotka voivat vaihdella sovelluksesta riippuen.
Stepper -moottorit voivat toimia eri tiloissa: aalto -asema, täysi asema ja puoliveto.Jokainen tila hallitsee moottorifaasien virran virran, mikä vaikuttaa sen suorituskykyyn ja tekee siitä sopivan erilaisiin käyttötarkoituksiin.
Aaltolaitetilassa vain yksi vaihe moottorin virta on kerrallaan.Tämä yksinkertainen ohjaustila on hyödyllinen tilanteissa, joissa tehon hyötysuhde priorisoidaan vääntömomentin aikana, kuten perusautomaatiotehtävissä, joissa tarvitaan minimaalinen lähtövirta.
Täysi käyttötila käyttää kahta vaihetta samanaikaisesti.Tämä johtaa suurempaan vääntömomentin ulostuloon, kun kaksi kelaa toimii yhdessä, mikä tekee siitä ihanteellisen sovelluksiin, joissa tarvitaan tarkkuutta ja voimaa, kuten robotiikassa ja CNC -koneissa.
Half Drive -tilassa yhdistyvät sekä aallon että täyden aseman ominaisuudet vuorotellen energisoimalla yhden vaiheen ja kaksi vaihetta.Tämä lähestymistapa tarjoaa pienemmät askelkoot, kaksinkertaistaen moottorin resoluutiot tehokkaasti.Puoli ajomatka sopii parhaiten sovelluksiin, kuten 3D -tulostukseen ja hienot instrumentit, joissa sileä liike ja tarkka paikannus ovat välttämättömiä.
Kun valitset askelmoottorin tiettyä käyttöä varten, harkitse käyttöympäristöä.Korkean tarkkuuden tehtävissä suositellaan puolivälin tilaa sileiden siirtymien ja vähentyneiden värähtelyjen varmistamiseksi.Energiansäästöihin keskittyneille projekteille aalto -tila voi olla tarkoituksenmukaisempi.
Oikean tilan valitseminen vaatii tasapainotuskertoimet, kuten vääntömomentti, nopeus ja järjestelmän monimutkaisuus.Oikean tilan valitseminen voi vaikuttaa merkittävästi moottorin suorituskykyyn ja järjestelmän yleiseen tehokkuuteen.
Askelmoottorin yhdistäminen PIC16F877A: lla
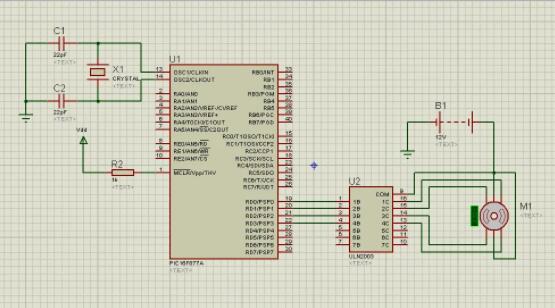
Askelmoottorin kytkeminen a Pic16f877a Mikrokontrolleri, voit käyttää ULN2003 -transistoriryhmää.Tämä integroitu piiri, joka on suunniteltu korkean vääntömomentin moottoreille, sisältää seitsemän Darlington-paria.Mikrokontrollerin alhaisemmat PORD -bitit on kytketty ULN2003: n syöttötappiin (1B, 2B, 3B, 4B), kun taas sen lähtötapit (1C, 2C, 3C, 4C) yhdistyvät askelmoottorin tapiin.Moottorin ja ULN2003: n COM -nastat on kytketty 12 V: n virtalähteeseen.
Stepper -moottoreita käytetään yleisesti sovelluksiin, jotka vaativat tarkkaa liikkeenhallintaa.Ne muuttavat digitaaliset pulssit mekaaniseksi kiertoksi, mikä tekee niistä ihanteellisia laitteille, kuten CNC -koneisiin ja 3D -tulostimiin, joissa sijaintia ja nopeutta on säänneltävä huolellisesti.
ULN2003: lla on avainrooli askelmoottorien hallinnassa johtuen kyvystä käsitellä korkeaa virtaa ja sen helppo rajapinta mikro -ohjaimiin.Kun se on kytketty PIC16F877A: hon, alempien porttien bittejä käytetään askelmoottorin ohjaamiseen.Tämä kokoonpano tarjoaa tarkan vaiheen hallinnan, varmistaen tarkan liikkeen ja paikannuksen.
ULN2003: n käyttäminen moottorin ohjausasetuksissa on erittäin luotettava reaalimaailman sovelluksissa.Se auttaa minimoimaan kysymykset, kuten ohitettujen vaiheet tai väärä sijainti, parantamalla yleistä suorituskykyä.Käyttötietoihin perustuva säännöllinen ylläpito ja kalibrointi voi edelleen optimoida moottorin toiminnan varmistaen pitkäaikaisen vakauden ja tarkan toiminnan.
Askelmoottorin nopeuden säätäminen
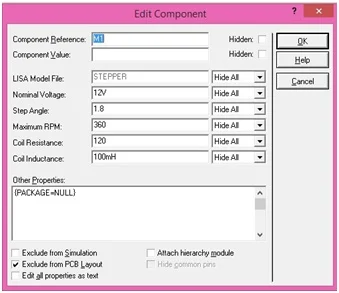
Stepper -moottorin nopeutta voidaan muokata tarkasti proteus -simulointiohjelmiston avulla.Pääsymällä moottorin asetuksiin 'Muokkaa ominaisuuksia', parametrien säätö, kuten vaiheiden lukumäärä ja askelkulma.Esimerkiksi 200-vaiheinen moottori jakaa täydellisen kierto (360 °) 200 vaiheeseen, jolloin jokainen vaihe 1,8 °.Näiden Proteuksen asetusten muuttaminen heijastuu dynaamisesti simulaation aikana.
Käytännössä Stepper -moottoreita käytetään usein toimialoilla, joilla liikkumisen tarkka hallinta on ratkaisevan tärkeää, kuten CNC -koneissa ja robotiikassa.Vaihekulman ja askelten lukumäärän säätäminen hienosäätää moottoria tarkan liikkeen saavuttamiseksi tietyille tehtäville.
Askelmoottorin parametrien muuttaminen vaikuttaa suorituskykyominaisuuksiin, kuten vääntömomentti ja resoluutio.Esimerkiksi vaiheiden lukumäärän lisääminen parantaa yleensä resoluutiota, mutta voi vaikuttaa vääntömomenttiin ja vasteaikaan.Näiden kompromissien ymmärtäminen simulaation avulla auttaa tietoon perustuvien päätösten tekemisessä.
Vivahteinen näkökulma paljastaa, että iteratiiviset säädöt, joita seuraa käytännön kokeet, johtavat voimakkaampaan moottorin suunnitteluun.Se, että digitaaliset simulaatiot heijastavat tarkkaan reaalimaailman tuloksia, on kriittistä.Askelmoottorin määrittämisen vivahteet todellakin on tasapaino teoreettisen tarkkuuden ja käytännön toteutettavuuden välillä.
Askelmoottorin ohjelmointi PIC16F877A: lla
Tämä osa kattaa askelmoottorin ohjelmointia PIC16F877A -mikrokontrollerin avulla, selittämällä erilaisia ajotiloja ja tarjoamalla käytännön ohjeita tehokkaaseen toteutukseen.
Tässä on perus esimerkkikoodi, joka osoittaa askelmoottorin ohjauksen koko käyttötilassa:
tyhjä pää ()
{
Trisd = 0b00000000;// Aseta Portd lähtöksi
Portd = 0B11111111;// Alusta Portd
tehdä
{
Portd = 0b00000011;// energisoi kaksi vaihetta samanaikaisesti
Viivyt_ms (500);// 0,5 sekunnin viive
Portd = 0B00000110;
Viivyt_ms (500);
Portd = 0b00001100;
Viivyt_ms (500);
Portd = 0b00001001;
Viivyt_ms (500);
} kun taas (1);// silmukka toistaiseksi
}
Tässä koodissa PIC16F877A: n PORTD on määritetty lähtöporttina askelmoottorin ohjaamiseksi ULN2003 -ohjaimen läpi.Komentojakso energisoi askelmoottorin kaksi vaihetta kerrallaan, mikä on ominaista täysimääräiselle käyttötilalle.Tämä tila pitää roottorin kiinteässä asennossa maksimaalisen vääntömomentin kanssa, mutta yleensä kuluttaa enemmän virtaa.
Täysi käyttötila ei ole ainoa tapa hallita Stepper -moottoria.Aaltoasema- ja puolivetotilat tarjoavat vaihtoehtoja erityisten vaatimusten perusteella.Aaltoveto virittää vain yhden vaiheen kerrallaan, mikä vähentää virrankulutusta, mutta johtaa pienempaan vääntömomenttiin.Puoli ajomatka vuorottelee yhden ja kahden vaiheen välillä, mikä tarjoaa suuremman resoluution ja sileämmän liikkeen.
Ohjelmoiessasi askelmoottoreita, valitse tarpeitasi parhaiten sopiva ajotila, olipa kyse sitten tarkasta paikannuksesta, tehon hyötysuhteesta tai suurimmasta vääntömomentista.
Stepper -moottorien käytännön sovellukset
Stepper -moottoreita käytetään laajasti monilla toimialoilla, koska ne kykenevät tarjoamaan tarkkaa hallintaa ja luotettavaa suorituskykyä.Niiden monipuolisuus tekee niistä sopivia kaikkeen autoista ja kodinkoneista teollisuuskoneisiin ja lääkinnällisiin laitteisiin.
Autoteollisuusmaailmassa Stepper -moottoreilla on avainasemassa kaasun, ajovalojen ja ilmastoinnin kaltaisten järjestelmien hallinnassa.Ne auttavat hienosäätää näitä komponentteja varmistaen, että ajoneuvot toimivat sujuvasti ja tehokkaasti.Samaan aikaan toimistolaitteissa, kuten tulostimissa ja valokopioissa, askelmoottorit käsittelevät tehtäviä, kuten paperin ruokintaa ja musteen sijoittamista.Tämä tarkkuus varmistaa jatkuvasti tulostuslaadun ja sujuvan toiminnan ajan myötä.
Kotona laitteet, kuten pesukoneet ja astianpesukoneet, luottavat askelmoottoreihin veden virtauksen ja rummun pyörimisen hallitsemiseksi varmistaen, että kaikki toimii saumattomasti.Teollisuusympäristössä askelmoottorit ovat tärkeitä CNC-koneiden ja robottivarsien toiminnassa, joissa ne tarjoavat tarkan valmistuksen valmistukseen tarvittavat liikkeet.
Turvajärjestelmät hyötyvät myös askelmoottorien luotettavasta liikkeestä.Laitteissa, kuten valvontakameroissa ja automatisoiduissa lukoissa, askelmoottorit mahdollistavat sujuvan ja tarkan paikannuksen, mikä on välttämätöntä tehokkaan seurannan ja turvallisuuden kannalta.Terveydenhuollossa askelmoottoreita käytetään lääkinnällisissä laitteissa, kuten infuusiopumput ja kuvantamislaitteet, joissa ne tarjoavat tarkan ohjauksen, joka tarvitaan turvalliseen ja tarkkaan toimintaan.
Teknologian kehittymisen myötä Stepper -moottorien odotetaan löytävän vielä enemmän sovelluksia nousevilla aloilla, kuten robotiikassa ja itsenäisissä ajoneuvoissa.Niiden jatkuva kehitys johtaa todennäköisesti entistä suurempaan tarkkuuteen ja tehokkuuteen, laajentaen heidän rooliaan eri toimialoilla.
Vertailukelpoiset mikrokontrolleriosat
| Osanumero | PIC16F877A-I/P | PIC16F77-I/P | PIC16F74-I/P | PIC16F777-I/P |
| Valmistaja | Mikrosirun tekniikka | Mikrosirun tekniikka | Mikrosirun tekniikka | Mikrosirun tekniikka |
| Paketti / kotelo | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) | 40-DIP (0,600, 15,24 mm) |
| Nastat | 40 | 40 | 40 | 40 |
| Tietoväylän leveys | 8 b | 8 b | 8 b | 8 b |
| I/O: n lukumäärä | 33 | 33 | 33 | 36 |
| Rajapinta | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2c, spi, uart, usart |
| Muistin koko | 14 kb | 7 kb | 14 kb | 14 kb |
| Toimitusjännite | 5 V | 5 V | 5 V | 5 V |
| Oheislaitteet | Ruskea-out havaitsee/nollaa, POR, PWM, WDT | Ruskea-out havaitsee/nollaa, POR, PWM, WDT | Ruskea-out havaitsee/nollaa, POR, PWM, WDT | Ruskea-out havaitsee/nollaa, POR, PWM, WDT |
| Vertaa | PIC16F877A-I/P Vs. PIC16F77-I/P | PIC16F877A-I/P Vs. PIC16F77-I/P | PIC16F877A-I/P Vs. PIC16F74-I/P | PIC16F877A-I/P Vs. PIC16F777-I/P |
Usein kysyttyjä kysymyksiä [UKK]
1. Mitä askelmoottori käyttää mekaanisen liikkeen luomiseen?
Askelmoottori tuottaa mekaanisen liikkeen käyttämällä sähköisiä pulsseja.
2. Mitä askelmoottori tekee?
Askelmoottori liikkuu erillisissä vaiheissa.
3. Kuinka askelmoottorit mitataan?
Askelmoottorit mitataan asteina.
4. Kuinka monta vaihetta askelmoottori suorittaa?
Askelmoottori liikkuu yhden askeleen kerrallaan.
5. Kuinka monta viritysmuotoa askelmoottorilla on?
Askelmoottorilla on kolme viritysmuotoa.
6. Mikä on yksinkertaisin tapa yhdistää askelmoottori?
Yksinkertaisin tapa on kytkeä se PIC16F877A -mikrokontrolleriin.
7. Kuinka monta ULN2003: n syöttötapia on kytketty mikrokontrollerin PORD: n alhaisimpiin merkittäviin bitteihin?
Neljä syöttötapia on kytketty mikrokontrollerin PORTD: n pienimpiin merkittäviin bitteihin
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.
Miksi valita Adesto RM25C64DS-LTAI-B -muistiryhmä projektillesi?
10.10.2024
PC817 Optocopper: toiminnallisuus ja nykyaikaiset sovellukset
10.10.2024
Suositut viestit
-
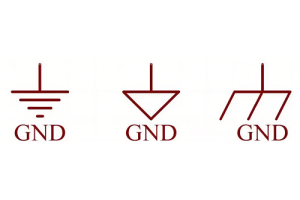
Mikä on GND piirissä?
01.01.1970 2843
-

RJ-45 Connector Guide: RJ-45 -liitin värikoodit, kytkentäjärjestelmät, R-J45-sovellukset, RJ-45
01.01.1970 2413
-

Kuituliitintyypit: SC vs LC ja LC vs MTP
01.01.1970 2026
-
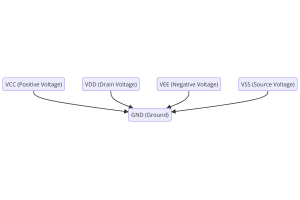
Virtalähteen jännitteiden ymmärtäminen Electronics VCC: ssä, VDD: ssä, VEE: ssä, VSS: ssä ja GND: ssä
05.11.0400 1772
-

Vertailu DB9: n ja RS232: n välillä
01.01.1970 1733
-

Mikä on LR44 -akku?
Sähkö, joka kaikkialla läsnä oleva voima, läpäisee hiljaa jokapäiväisen elämämme kaikki osat, triviaalisista välineistä hengenvaarallisiin lääketieteellisiin laitteisiin, sillä on hiljainen rooli.Tämän energian todella tarttuminen, etenkin sen tallentaminen ja tehokkaasti tuottaminen, ei kuitenkaan ole helppoa.Tätä taustaa vasten tämä artikkeli keskittyy tyyppiseen kolikkikenn...01.01.1970 1683
-
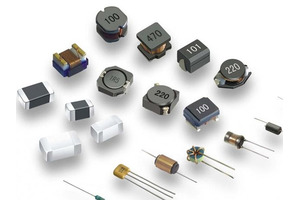
Perusteiden ymmärtäminen: induktanssiresistenssi ja kappaus
Sähkötekniikan monimutkaisessa tanssissa peruselementtien kolmikko on keskipiste: induktanssi, vastus ja kapasitanssi.Jokaisella on ainutlaatuiset piirteet, jotka määräävät elektronisten piirejen dynaamiset rytmit.Täällä aloitamme matkan näiden komponenttien monimutkaisuuden purkamiseksi, paljastamaan niiden erilliset roolit ja käytännölliset käytöt laajassa sähköorkesterissa.Ind...01.01.1970 1629
-

CR2430 Akun kattava opas: Tekniset tiedot, sovellukset ja vertailu CR2032 -akkuihin
Mikä on CR2430 -akku?CR2430 -paristojen edutNormiCR2430 -akkosovelluksetCR2430 EquivalentCR2430 vs CR2032Akku CR2430 -kokoMitä etsiä ostaessasi CR2430 ja vastaaviaTietolomake PDFUsein kysyttyjä kysymyksiä Paristot ovat pienten elektronisten laitteiden sydän.Monien käytettävissä olevien tyyppien joukossa kolikkosoluilla on ratkaiseva rooli, jota yleisesti löytyy laskimissa, kaukosäätimi...01.01.1970 1497
-

CR2450 vs CR2032: Voidaanko sen sijaan käyttää akkua?
Litium -mangaaniparistoilla on joitain samankaltaisuuksia muiden litiumparistojen kanssa.Korkean energian tiheys ja pitkä käyttöikä ovat ominaisuuksia, joita heillä on yhteisiä.Tällainen akku on voittanut monien kuluttajien luottamuksen ja suosion ainutlaatuisen turvallisuuden vuoksi.Kalliit tekniset vempaimet?Pienet laitteet koteissamme?Katso ympärillesi ja näet ne kaikkialla.Näistä mo...01.01.1970 1471
-
Mikä on RF ja miksi käytämme sitä?
Radiotaajuus (RF) -tekniikka on keskeinen osa modernin langattoman viestinnän, mikä mahdollistaa tiedonsiirron pitkillä etäisyyksillä ilman fyysisiä yhteyksiä.Tämä artikkeli perustuu RF: n perusteisiin selittäen, kuinka sähkömagneettinen säteily (EMR) mahdollistaa RF -viestintä.Tutkimme EMR: n periaatteita, RF-signaalien luomista ja hallintaa sekä niiden laajaa käyttöä.Artikkeli ...01.01.1970 1455
Kuuma osanumero
-

RT0402DRD0720KL
YAGEO
RES SMD 20K OHM 0.5% 1/16W 0402
MCR100JZHF1960
Rohm Semiconductor
RES SMD 196 OHM 1% 1W 2512
CLA4606-085LF
Skyworks Solutions Inc.
RF DIODE PIN 75V 3W 3QFN
C8051F850-C-GU
Silicon Labs
IC MCU 8BIT 8KB FLASH 24QSOP
R1EX24002ASAS0I#U0
Renesas Electronics America Inc
IC EEPROM
30KPA280CA
Littelfuse Inc.
TVS DIODE 280VWM 464VC P600
IS42S16800F-5TLI
ISSI, Integrated Silicon Solution Inc
IC DRAM 128MBIT PAR 54TSOP II
TUSB8020BIPHPR
Texas Instruments
IC USB 3.0 HUB 2 PORT 48HTQFP
MCP6S26-I/ST
Microchip Technology
IC OPAMP PGA 6 CIRCUIT 14TSSOP
SN74LS00DBR
Texas Instruments
IC GATE NAND 4CH 2-INP 14SSOP
PG0437.601NLT
Pulse Electronics
FIXED IND 600NH 18A 0.85MOHM SMD
MAX242CPN+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 18DIP
LM810M3X-2.93
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-3
ADR425BRZ
Analog Devices Inc.
IC VREF SERIES 0.04% 8SOIC
UMK063CG680JT-F
Taiyo Yuden
CAP CER 68PF 50V C0G/NP0 0201
TOP249Y
Power Integrations
IC OFFLINE SW FLYBACK TO220-7C
SN1111015PWPR
Texas Instruments
PROTOTYPE
02013A8R2DAT2A
KYOCERA AVX
CAP CER 8.2PF 25V NP0 0201 -

GRM1556P1H110GZ01D
Murata Electronics
CAP CER 11PF 50V P2H 0402
VE-J40-CX
Vicor Corporation
DC DC CONVERTER 5V 75W
OP470GP
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14DIP
TPS2064CDGNR
Texas Instruments
IC PWR SWITCH N-CHAN 1:2 8MSOP
T521V226M025ATE060
KEMET
CAP TANT POLY 22UF 25V 2917
TPS62231TDRYRQ1
Texas Instruments
IC REG BUCK 1.8V 500MA 6SON
LTC3407EDD-2#TRPBF
Analog Devices Inc.
IC REG BUCK ADJ 800MA DL 10DFN
HDP24-24-16PE-L017
TE Connectivity Deutsch Connectors
CONN RCPT HSNG MALE 16POS PNL MT
24AA32AF-I/SN
Microchip Technology
IC EEPROM 32KBIT I2C 8SOIC
BR24T128FJ-WE2
Rohm Semiconductor
IC EEPROM 128KBIT I2C 8SOPJ
TMK325B7105KD-T
Taiyo Yuden
CAP CER 1UF 25V X7R 1210
91305AMLFT
Renesas Electronics America Inc
IC ZD BUFFER 8SOIC
SN74HC00PWR
Texas Instruments
IC GATE NAND 4CH 2-INP 14TSSOP
DSPIC33EP128GS808-I/PT
Microchip Technology
IC MCU 16BIT 128KB FLASH 80TQFP
PCM1760P
Texas Instruments
IC ADC 20BIT SIGMA-DELTA 28DIP
TPSMF4L36A
Littelfuse Inc.
TVS DIODE 36VWM 58.1VC SOD123FL
MAX3185CWP+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 3/5 20SOIC
MGA-622P8-TR1G
Broadcom Limited
IC RF AMP 1.5GHZ-2.7GHZ 8DFN -

IXKH47N60C
IXYS
MOSFET N-CH 600V 47A TO247AD
2N5680
Microchip Technology
TRANS PNP 120V 1A TO39
CRCW2512150RFKEG
Vishay Dale
RES SMD 150 OHM 1% 1W 2512
RT0603DRE07432KL
YAGEO
RES SMD 432K OHM 0.5% 1/10W 0603
H11B255
onsemi
OPTOISO 5.3KV DARL W/BASE 6DIP
HZ5B2TA-E
Renesas Electronics America Inc
DIODE ZENER 0.5W
UCC3305N
Texas Instruments
IC HID LAMP CNTRL 120KHZ 28DIP
M-FIAM5BHG1
Vicor Corporation
INPUT ATTENUATOR MODULE
ADP1710AUJZ-1.3-R7
Analog Devices Inc.
IC REG LINEAR 1.3V 150MA TSOT5
RT1206DRE076K8L
YAGEO
RES SMD 6.8K OHM 0.5% 1/4W 1206
UCC256403DDBT
Texas Instruments
HALF BRIDGE CONT WITH HV DRIVER
TPD3S714QDBQRQ1
Texas Instruments
IC DIODE INTERFACE PROT 16SSOP
TPS2000CDGNR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 8MSOP
1SMB36CAT3G
onsemi
600 W TRANSIENT VOLTAGE SUPPRESS
MIC281-5BM6TR
Microchip Technology
LOW-COST THERMAL SENSOR
AQV210AZ
Panasonic Electric Works
SSR RELAY SPST-NO 130MA 0-350V
XC6203E502PR-G
Torex Semiconductor Ltd
IC REG LINEAR 5V 400MA SOT89
EDB8132B4PB-8D-F-D
Micron Technology Inc.
IC DRAM 8GBIT PARALLEL 168FBGA