Täydellinen opas moottorivetyihin ja muihin
Moottorin ohjain on elektroninen laite, joka muuntaa sähköenergian mekaaniseksi energiaksi.Siksi moottori -asemien avulla voit käyttää sähköä automatisoituun työhön.Jos projektisi vaatii moottorikuljettajien käytön, moottorin kuljettajien ymmärtäminen auttaa suojaamaan projektiasi.Tämä artikkeli auttaa sinua ymmärtämään, kuinka moottorivedot toimivat, niiden ominaisuudet, tyypit ja niiden yhdistämiseen liittyvät peruskomponentit.
Moottorin kuljettajien määritelmä ja merkitys
Avain CHMoottorin kuljettajien arakteristit
Moottorin asemien pääkomponentit
Yleiset moottorityypit
Moottorin kuljettajien toimintaperiaate
Moottorin kuljettajien tarve
Moottorivetojen merkitys sovelluksissa
H-siltapiirin levitys
Vaiheet moottorin käyttöpiirin rakentamiseksi
Yhteenveto
D -dEfinitio ja merkitys moottorin kuljettaja
Moottorin kuljettaja
Moottorin ohjain, joka on nimensä mukaan, on edistyksellinen laite, joka on muotoiltu moottorin toiminnan tarkkaan hallintaan.Se toimii välttämättömänä rajapintana, joka yhdistää moottorin mikrokontrolleriin.Moottorit, etenkin suuritehoiset, kysyntäjännitteet nousevat satoihin voltteihin ja merkittäviin toimintovirroihin.Kasteasti mikrokontrollerit hallitsevat tyypillisesti vain pieniä jännitteitä, jotka vaihtelevat 5 - 12 volttia, virtauksilla vain satoja milliampeja.Suora liitäntä moottorin ja mikrokontrollerin välillä, puuttuvat välilaitteet, riskit ylikuormittaa tai vahingoittaa jälkimmäistä.
Moottorin kuljettajat ovat enemmän kuin pelkkiä liittimiä;Ne ovat elintärkeitä jännitteen ja virran muunnoksen kannalta.He antavat mikrokontrollereille mahdollisuuden manipuloida tarkasti moottorin nopeutta, suuntaa ja vääntömomenttia.Otetaan esimerkiksi robottivarret tai sähköajoneuvot;Heidän suorituskyvyn tarkkuus, kriittinen näkökohta, riippuu tästä hallinnasta.
Moottorin kuljettajat koostuvat ytimessä sähkö elektronisista komponenteista - transistoreista ja diodeista.He tekevät yhteistyötä virran moduloimiseksi moottorille.Usein nämä komponentit on järjestetty H-siltakokoonpanoon.Tämä malli mahdollistaa kaksisuuntaisen virran virtauksen, jolloin moottorit voivat pyöriä eteenpäin ja taaksepäin.Ohjaus saavutetaan PWM (pulssin leveyden modulaatio) -signaalin avulla.Tämä mikrokontrollerista peräisin oleva signaali säätää moottorin nopeutta muuttamalla pulssin leveyttä, mikä säätelee keskimääräistä virtaa moottoriin.
Markkinoilla moottorin kuljettajat ilmeisesti ilmenevät integroituina piireinä (ICS).Nämä IC: t kapseloivat kaikki tarvittavat elektroniset komponentit ja tarjoavat usein lisäominaisuuksia, kuten ylivirtasuojausta, lämmönsuojausta ja jännitesäätelyä.Nämä suojatoimenpiteet varmistavat järjestelmän yleisen vakauden ja turvallisuuden.Näiden asemien valinta perustuu moottorityyppiin - olipa kyse sitten DC-, askel- tai servomoottoreista - ja sovelluskontekstin, joka kattaa teollisuusautomaation kulutuselektroniikkaan.
Moottorin ohjaimien keskeiset ominaisuudet
Sopivan moottorin kuljettajan valitseminen sisältää erilaisten keskeisten elementtien vivahteellisen arvioinnin, mikä vaatii syvällistä ymmärrystä saumattomasti yhdenmukaisesti tietyn sovelluksen erityisvaatimusten kanssa.Moottorityyppien monipuolinen luonne vaatii erikoistuneita asemia, mikä tekee yhteensopivuudesta ensisijaisen harkinnan.Esimerkiksi tasavirtamoottorin (DC -moottori) kuljettajat osoittavat kyvykkyyttä käsittelemään vakaita virtauksia ja jännitteitä, kun taas askelmoottorin kuljettajat valtuuttavat moottorin pyörimisvaiheiden monimutkaisen seurannan.Terävässä vastakohtana servomoottorivetoilla on monimutkaisia ominaisuuksia, kuten suljetun silmukan ohjaus, varmistaen tarkkuuden asennossa ja nopeuden säätelyssä.
Toinen kriittinen osa on käyttöliittymän luontainen luonne.Lukuisat moottorikuljettajat on muotoiltu huolellisesti integroitumaan saumattomasti tunnetuihin mikrokontrollerevyihin, kuten Arduinoon, joissa on tavanomaiset digitaaliset tai analogiset syöttörajapinnat.Nämä rajapinnat antavat mikrokontrollerin valtuuttamaan moottoritoimintoja nimenomaisten direktiivien avulla.Langattomilla ominaisuuksilla varustetut asemat, jotka kattavat Bluetooth- tai Wi-Fi-moduulit, hallitsevat projekteja, jotka vaativat kaukosäädintä tai integrointia älykkäisiin kotijärjestelmiin.Langaton yhteys helpottaa älypuhelinsovellusten tai etäpalvelimien komentojen vastaanottoa.
Jännite ja virran yhteensopivuus ilmenee välttämättöminä näkökohdina yhdenmukaistaessa moottorin käyttöä tietyllä moottorilla ja sen levityksellä.Ajoneuvon on taitava hallita moottorin maksimaalista virran ja jännitteen edellytystä, mikä lieventää ylikuormituksen tai optimaalisen moottorin suorituskyvyn vaaraa.Lisäksi huipputehokkuus vaativat sovellukset voivat edellyttää edistyneiden tehonhallintaominaisuuksilla varustettuja kuljettajia, jotka kattavat virran rajoittamisen, lämmönsuojauksen ja jännitesäätelyn.Nämä ominaisuudet varmistavat turvallisuuden ja vakauden erilaisissa operatiivisissa olosuhteissa.
Käytännöllisissä skenaarioissa näiden perustavanlaatuisten ominaisuuksien lisäksi muuttujat, kuten koko, tehokkuus, jäähdytysominaisuudet ja kustannukset, voivat vaikuttaa projektin laajuuteen.Näillä huolellisilla näkökohdilla on kollektiivisesti keskeinen rooli valitessaan järkevästi moottorikuljettajaa, joka on moitteettomasti yhdenmukainen tietyn projektin erillisiin tarpeisiin.
Moottorin käytön pääkomponentit
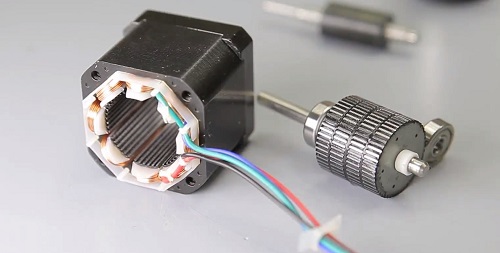
Moottori, joka on kiistatta moottorin käyttöjärjestelmän ydin, on kriittinen tarkkuus vaativissa sovelluksissa, kuten robotiikka ja tarkkuusvalmistuslaitteet.Näillä aloilla käytetään yleisesti servomoottoreita, jotka on tunnettu heidän korkean tarkkuuden hallinnasta, nopeudesta ja kiihtyvyydestä.Sitä vastoin tasavirtamoottorit (DC -moottorit), erityisesti harjattomat tasavirtamoottorit (BLDC), suositaan jatkuvaa kiertoa vaativissa sovelluksissa, kuten sähkötyökalut ja puhaltimet.
Järjestelmän aivoina toimiva ohjain käsittää tyypillisesti mikro -ohjaimen tai mikroprosessorin.Se on vastuu tulossignaalien tulkinnasta - nopeudesta, suunnasta, sijaintiohjeista - ja vastaavasti tuottaa komentoja moottorin ohjaamiseksi.Hienostuneemmissa asennuksissa erikoistuneet liikkeenohjaimet suorittavat kompleksialgoritmeja, kuten PID-hallinta (suhteellisen integraalinen johdannainen ohjaus), mikä parantaa liikkeenohjauksen tarkkuutta.
Moottorin käyttöpiirillä on keskeinen rooli sekä servomoottori- että tasavirtamoottorijärjestelmissä, jotka toimivat virran vahvistimena.Se lisää mikrokontrollerin lähtösignaalia riittävän tehokkaalle tasolle moottorin ajamiseksi.Tämä piiri, johon liittyy usein H-Bridges, MOSFET: t ja transistorit, on taitava hallitsemaan suuritehoisia kuormia ja moduloimaan moottorin suuntaa ja nopeutta.
Virtalähdeyksikkö, joka tarjoaa välttämätöntä voimaa sekä moottorille että ohjaimelle, vaikuttaa merkittävästi järjestelmän suorituskykyyn.Sen vakaus ja tehokkuus ovat ensiarvoisen tärkeitä.Virtalähteen valinta riippuu suurelta osin moottorityypistä ja tehonvaatimuksista;Esimerkiksi servomoottorit saattavat tarvita vaihtovirtaa (AC), kun taas DC -moottorit vaativat tasavirtaa (DC).
Yhteydet ja rajapinnat varmistavat tarkat signaalin lähetyksen ja tehokkaan sähköenergian virtauksen moottorien, ohjaimien, käyttöpiirien ja virtalähteiden välillä.Lisäksi nämä järjestelmät integroituvat usein ulkoisiin laitteisiin, kuten antureihin, näytöihin tai kaukosäätimien rajapintoihin parannetun toiminnallisuuden saavuttamiseksi.
Lopuksi, edistyneet moottorin käyttöjärjestelmät voivat sisältää lisäkomponentteja, kuten anturit (sijainti ja nopeus), jäähdytysjärjestelmät (jäähdyttimet tai puhaltimet) ja suojaelementit (ylivirta- ja ylikuumenemissuojaus).Nämä lisäykset nostavat merkittävästi käyttöjärjestelmän tarkkuutta, vakautta ja turvallisuutta.
Yleiset moottorityypit

Motor Drive -sovellukset
Moottorin työntövoiman laajassa domeenissa määrittelevä elementti on monimutkaisissa ohjausmekanismeissa ja erityiset moottorit, joihin jokainen variantti palvelee.Katsotaanpa joitain huomionarvoisia poikkeamia:
Suora sähkövirran moottori (DC -moottori) -asemat: Räätälöity hyödyntämistä varten DC -moottoreilla, jotka kattavat harjaton DC -moottorit (BLDC), nämä työntöjärjestelmät saavuttavat perustavanlaatuisen nopeuden hallinnan jännitemodulaation tai pulssin leveyden modulaation (PWM) avulla.Esimerkki on L293, laajalti käytetty tasavirtamoottorin kuljettaja, joka taittaa kahden moottorin suuntaa ja nopeutta samanaikaisesti.
Stepper -moottorin kuljettaja: Tämä kuljettaja on erinomainen säätämällä hienosti askelmoottorin askelpituutta varmistaen huolellisen asennon ja nopeuden hallinnan.Se toimii ohjaamalla vuorottelevaa virtaa moottorivaiheiden välillä ohjaten askelmoottorin jokaista vaihetta.
Servomoottorivedot: Tunnustetaan nopeasta vastauksestaan nopeudella, sijainnissa ja kiihtyvyyden hallinnassa, nämä työntöjärjestelmät käyttävät usein suljetun silmukan ohjausjärjestelmää.Ne sopivat taitavasti aseman ja nopeuden variaatioihin, mikä mahdollistaa korkean tarkkaan liikkeenhallinnan.Servo -asemilla on keskeinen rooli robotiikassa, automatisoidussa koneessa ja tarkkuusvalmistuksessa.
Erityiset integroidun piirin (IC) ohjaimet: virtaviivaistaminen integrointiin mikrokontrollereihin, nämä ohjaimet tarjoavat ominaisuuksia, kuten ylivirtasuojausta ja vikadiagnostiikkaa.Havainnollistava esimerkki on DRV8833, huolellisesti muotoiltu IC -ohjain pienten tasavirta- tai askelmoottorien ohjaamiseksi.
Suurten moottori-moottori-asemat: Räätälöity vastaamaan suurten moottorien merkittäviä virta- ja jännitevaatimuksia, nämä työntöjärjestelmät sopivat sovelluksiin, jotka vaativat voimakasta tehontuotusta, kuten sähköajoneuvoja tai huomattavia teollisuuskoneita.Ne käyttävät joustavia elektronisia komponentteja, kuten IGBT: t (eristetyt portin bipolaariset transistorit) ja suuritehoiset MOSFET: t.
Ohjelmoitava moottoriohjain: Toisin kuin edellä mainitut tyypit, tämä ohjain tarjoaa muokattavan käyttöliittymän käyttäjille ohjelmoidakseen parametrit.Se palvelee erityisiä valvontatarpeita projektivaatimusten perusteella, mikä tekee siitä sopivan monimutkaisten sovellusten automaatiotekniikassa ja T & K -projekteissa.
Tämä moottorin työntövoiman tutkimus esittelee niiden monimuotoisuutta ja erikoistuneita sovelluksia.Jokainen tyyppi tuo taulukkoon ainutlaatuisen ominaisuuden, joka vastaa eri toimialojen ja projektien monimutkaisia tarpeita.
Moottorin kuljettajan toimintaperiaate

moottorikäyttö
Kunkin moottoritoiminnon ytimessä on mikrokontrolleri tai mikroprosessori, joka toimii koko tekniikan aivoina.Nämä älykkäät laitteet voivat tuottaa ohjaussignaaleja ohjelma -ohjeista tai käyttäjän syöttöistä, mukaan lukien nopeus, suunta ja sijainti.Automaatioskenaariossa anturitietojen vastaanottamisen jälkeen ohjain luo ohjeita ohjaamaan moottoria käyttämään.
Mikrokontrollerin pienitehoiset digitaaliset signaalit muunnetaan moottorin ohjaimessa suuritehoiseksi ulostuloksi, joka on räätälöity erityisesti moottorin sitoutumista varten.Tämä siirtyminen toteutetaan tyypillisesti mekanismeissa, kuten H-siltapiirit tai kompleksinen teho-mosfetit.
H-siltapiiri on avainkomponentti moottori-asemissa, etenkin tasavirtamoottorivetoissa.Se koostuu neljästä kytkimestä (yleensä transistorit) "H" -muotoisessa rakenteessa, joka voi muuttaa moottorin virran virtaussuuntaa ja säätää siten moottorin suuntaa.Samanaikaisesti näiden kytkimien modulointi suoritetaan tarkan PWM -tekniikan avulla, mikä mahdollistaa moottorin nopeuden hienon hallinnan.
Syötä pulssin leveyden modulaatio (PWM), taktinen johdin, joka hallitsee moottorin keskimääräistä virtaa manipuloimalla taitavasti tehoa H-siltapiirissä.Syöttöjännitteen säätämisen lisäksi PWM antaa mikrokontrollerille mahdollisuuden hallita moottorin nopeutta hienostuneesti.
Sulje tarkastus paljastaa, että moottorin ohjaimen sisällä on syöttötapoja ja ohjauslogiikkaa, ja jokaisen PIN -koodin tehtävänä on vastaanottaa toinen ohjaimesta.Nämä tapit ovat vastuussa toimintojen, kuten moottorin käynnistyksen/stop, suuntaohjauksen ja nopeuden säätelyn, koordinoinnista, siitä, että se on tullut aseman sisäisten logiikkapiirien työkaluiksi tulkita signaaleja ja muuntaa ne huolellisesti suoritetuiksi moottorin ohjaustoimenpiteiksi.
Kompleksisten moottorivetojärjestelmien maailmassa antureista tulee hiljaisia tarkkailijoita - mittausasento, nopeus tai virra - moottorin tilan tarkastamiseksi.Tämä rikas tieto muodostaa perustan suljetun silmukan ohjaamiselle, varmistamalla, että moottorin toiminta seuraa ennalta määritettyjä parametreja.Suojatoimenpiteenä joukko turvaominaisuuksia, mukaan lukien ylikuormitus, ylikuumeneminen ja jännitteen poikkeavuussuojaus, suojausmoottorit ja monimutkaiset piirit.
Moottorin kuljettajan tarve
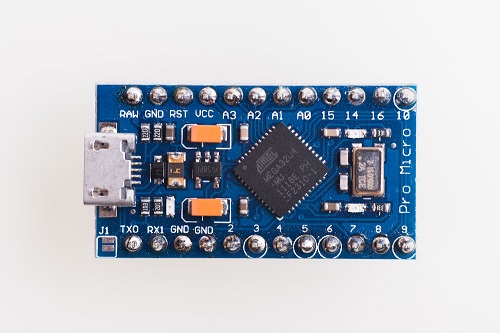
Osa Arduino -projektista
Mikrokontrollerin ja moottorin väliin sisältäen välittäjämoottorin ohjaimen sisällyttäminen keskeiseksi sitoumukseksi, pääasiassa jännitteen ja virran vaatimusten karkean kontrastin vuoksi.Mikrokontrollerit toimivat tyypillisesti pienten jännitteillä (esim. 3,3 V tai 5 V) ja virroilla milliamp -tasolla - kiireellisyys, joka poikkeaa voimakkaasti moottorien tarpeellisuuksista, jotka saattavat edellyttää kohonneita jännitteitä (satoja voltteja jopa satoja) ja virroita (satoja voltteja) ja virrat (suurempi virta (satoja voltteja) ja virrat (suurempi kuin virrat (suuret suuret virrat (useita ampeereja tai enemmän).
Suora liitäntä moottorin ja mikrokontrollerin välillä on luontainen ylikuormitus- ja mahdollisten vaurioiden riski.Tämän seurauksena moottorin kuljettaja olettaa muuntamisväliaineen ratkaisevan roolin muuttaen taitavasti mikrokontrollerista peräisin olevat pienitehoiset signaalit moottorin vaatimiksi voimakkaiksi lähtösignaaleiksi.
Moottorin ohjaimen ensisijainen tehtävä on sovittaa jännitteen ja virran hajoamiset mikrokontrollerien ja moottorien välillä.Mikrokontrolleri, joka on tottunut matalajännitteisiin ja virtauksiin, on karkeassa kaksitahoisessa dichotomiassa moottorin vaatimuksilla.Moottorin kuljettaja toimii keskeisenä välittäjänä, siirtäen nerokkaasti mikrokontrollerin pienitehoisen signaalin moottorin välttämättömään suuritehoiseen ulostuloon, lieventäen piileviä ylikuormitus- ja vaurioita.
Lisäksi moottorin kuljettajat käyttävät huomattavaa vaikutusta ohjauksen tarkkuuden parantamiseen eri ulottuvuuksien, kuten nopeuden, suunnan ja kiihtyvyyden välillä.Tämä tarkkuus edellyttää ensiarvoisen merkitystä sovelluksissa, jotka vaativat huolellista liikkeenhallintaa, mukaan lukien, mutta rajoittumatta, robottivarret, automatisoidut koneet ja tarkkuuden sijaintijärjestelmät.
Toinen valtakunta, jossa moottorin kuljettajat väittävät, että niiden merkitys on mikrokontrollerien turvaamisessa.Moottoreilla on taipumus tuottaa haitallisia jännitepiikiä tai käänteisvirtoja aloittamisen tai lopettamisen aikana, mikä aiheuttaa välittömän uhan mikrokontrollereille.Moottorivetyissä on usein suojapiiri, joka kattaa eristyksen, ylijännitteen ja ylivirtaustoimenpiteet, pystyttäen valtavan puolustuksen mahdollisesti vahingollisilta signaaleilta ja mikrokontrollerin eheyden säilyttäminen.
Energiatehokkuus on keskipisteessä, etenkin moottori -asemissa, joissa käytetään pulssin leveyden modulaatiotekniikkaa (PWM).Nämä asemat harmonisoivat moottorien voimankulutusta, jolla on suurempi tehokkuus, mikä ei vain säästä energiaa, vaan myös vähentää ylikuumenemisen aiheuttamien motoristen vaurioiden riskiä.Moottorin kuljettajilla on erilaisia rajapintaominaisuuksia, jotka yksinkertaistavat yhteyksiä moniin mikrokontrollereihin ja ulkoisiin ohjausjärjestelmiin.Tämä sisältää saumattoman integroinnin tietokoneisiin, kaukosäätimiin tai muihin automaatiolaitteisiin, mikä osoittaa sen monipuolisuuden sopeutumisessa monimutkaisten järjestelmiin.
Toinen näkökohta, joka erottuu, on palautteen ja seurannan tarjoaminen edistyneissä moottorivetyissä.Nämä asemat sisältävät tyypillisesti anturipalautemekanismeja moottorin tilan reaaliaikaiseen seurantaan, mukaan lukien parametrit, kuten nopeus, sijainti ja lämpötila.Tämä palaute on olennainen osa suljetun silmukan ohjausjärjestelmiä ja auttaa automaattisen virittämisen ja ennaltaehkäisevän vian havaitsemisessa.
Moottorivetojen merkitys sovelluksissa

Servomoottori lähikuva
Moottorin ohjaimen sisällyttäminen mikrokontrollerin ja moottorin väliin ilmenee keskeinen välttämättömyys.Tämä välttämättömyys ei johdu vain kahden komponentin usein epäyhtenäisestä jännitteestä ja virran edellytyksistä, vaan myös monipuolisista toiminnoista, joita moottorin ohjain olettaa järjestelmässä.
Jännite ja virran harmonia: Mikrokontrollerit toimivat tyypillisesti vähentyneillä jännitteillä, kuten 3,3 V tai 5 V, ja millimpien mitattujen virtojen ollessa.Sitä vastoin moottorit voivat edellyttää kohonneita jännitteitä, toisinaan kymmenistä satoihin voltteihin ja lisättyihin virroihin, saavuttaen useita ampeereja tai sen jälkeen.Suora yhteys moottorin ja mikrokontrollerin välillä aiheuttaa ylikuormituksen vaaran ja haittaa jälkimmäiselle.Tässä moottorin kuljettaja toimii taitavana välittäjänä, siirtäen taitavasti mikrokontrollerin pienitehoisia signaaleja voimakkaiksi signaaleiksi, jotka sopivat moottorin toimintaan.
Parannettu ohjaustarkkuus: Moottorivedot helpottavat parametrien, kuten nopeuden, suunnan ja kiihtyvyyden, yksityiskohtaisempaa hallintaa.Tämä yksityiskohtainen ohjauskyky on välttämätön sovelluksissa, jotka vaativat monimutkaisen liikkeenhallinnan (kuten robottivarret, automatisoidut koneet tai tarkkuuden sijaintijärjestelmät).
Mikrokontrollerin turvaaminen: moottoreilla on taipumus tuottaa haitallisia jännitepiikiä tai käänteisiä virroja, etenkin aloitus- tai lopettamisvaiheiden aikana, mikä uhkaa mikrokontrolleria.Moottorin kuljettajat sisältävät usein suojapiirit, jotka kattavat eristyksen, ylijännitteen ja ylivirtasuojan, suojaamaan mikrokontrolleria näistä haittavaikutuksista.
Energiankulutuksen optimointi: Moottorivedot, etenkin ne, jotka hyödyntävät PWM (pulssin leveyden modulaatio), excel moottorin virrankulutuksen hallinnassa.Tämä ei vain vahvista energiatehokkuutta, vaan myös lievittää ylikuumenemisen aiheuttaman moottorin vaarnan vaaraa.
Monimuotoisuus rajapinnassa: Moottorivedet jakamalla joukko rajapintoja, helpottaen yhteyksiä erilaisiin mikrokontrollereihin ja ulkoisiin ohjausjärjestelmiin, kuten tietokoneisiin, kaukosäätimiin tai muihin automaatiolaitteisiin.Tämä monipuolisuus edellyttää kardinaalia roolia monimutkaisten järjestelmien yhdistämisessä.
Palaute ja valvonta: Hienostuneet moottori-asemat voivat kattaa anturin palautteen, mahdollistaa moottorin tilan reaaliaikaisen seurannan, kattaa nopeuden, sijainnin, lämpötilan ja muun.
Tällainen palaute osoittautuu välttämättömäksi suljetun silmukan ohjausjärjestelmissä, lisäämällä automaattisia säätöjä ja edistävät vikaantumista.
H-siltapiirin levitys

H-siltapiiri
H-siltapiiri, moottorin ohjauksessa oleva kulmakivi, tarjoaa laajoja sovelluksia eri kenttien välillä.Sen toiminnallisuus- ja sovelluspektriä voidaan tutkia seuraavasti:
Koostumus: Tyypillinen H-Bridge käsittää neljä kytkentäelementtiä, usein transistoreita, jotka voivat olla MOSFET- tai bipolaarisia tyyppejä.Nämä komponentit on strategisesti järjestetty jäljittelemään kirjainta "H", kun moottori kytkee piirin keskussegmentissä.
Moottorin suunnanhallinta: H-silta muuttaa moottorin virran suuntaa muuttamalla transistorien kytkentätiloita.Esimerkiksi kaksi transistoria piirin toisella puolella deaktivoimalla vastakkainen pari indusoi tietyn virran virtauksen, pyörittäen moottoria yhteen suuntaan.Tämän transistoriyhdistelmän kääntäminen aiheuttaa moottorin pyörivän vastakkaisesti.
Nopeuden säätö: Suuntaohjauksen lisäksi H-silta säätelee myös moottorin nopeutta, pääasiassa pulssin leveyden modulaation (PWM) kautta.PWM moduloi virranvirtauksen (käyttöjakson) kestoa korkealla taajuudella hallitsemalla moottorin keskimääräistä tehoa ja siten sen nopeutta.
Sovellusalue: H-Bridge-piirin tarkat ohjausominaisuudet tekevät siitä sopivan eri sovelluksiin.Sitä käytetään pienimuotoisissa tasavirtamoottoreissa leluissa ja kodinkoneissa sekä laajemmassa mittakaavassa pyrkimyksissä, kuten sähköajoneuvoissa ja teollisuusohjausjärjestelmissä.
Integroidut ohjaimet: Markkinat tarjoavat integroituja H-silta-ohjaimia, yhdistämispiirejä, ohjauslogiikkaa ja suojatoimintoja.Nämä integroidut ratkaisut yksinkertaistavat suunnittelua, parantavat luotettavuutta ja sisältävät usein ominaisuuksia, kuten ylikuormitus, lämmönsuojaus ja jännitteen vakauttaminen.
Suunnitteluhaasteet: Huolimatta tehokkuudestaan H-Bridgesin suunnittelu asettaa haasteita.Näitä ovat nopean ja turvallisen transistorin vaihtamisen varmistaminen, ampumisen estäminen (samanaikainen johtavuus, joka johtaa oikosulkuihin) ja lämmön hallinta korkean taajuuden kytkemisestä.
Vaiheet moottorin käyttöpiirin rakentamiseksi
Moottorin käyttöpiirin rakentaminen vaatii huolellisen suunnittelun ja tarkan toteutuksen.Katsotaanpa kyseisiin vaiheisiin keskittyen piiriin, jossa käytetään L293D -moottorin ohjainta ja Arduino UNO: ta:
Komponenttien valmistelu: Aloita keräämällä välttämättömät tiedot - Arduino UNO (tai yhteensopiva mikrokontrolleri), L293D -moottorin ohjain, yksi tai useampi tasavirtamoottori, virtalähde (kuten akku tai virtalähde), hyppyjohdot ja kaikki ylimääräiset anturit tai anturit tai anturitapukomponentit.
L293D: n ymmärtäminen: L293D, laajalti käytetty moottorikuljettaja, pystyy käsittelemään jopa 600 mA: n ja sisältää ylivirtasuojan.Siinä on useita tapoja moottorin ohjaamiseksi (tulo ja lähtö), tehoa ja maadoitusta varten.
Piirikaavion suunnittelu: Prosessin ratkaisevan tärkeä on piirikaavion luominen tai konsultointi.Tämän suunnitelman tulisi havainnollistaa Arduinon digitaalisten lähtötappien ja L293D: n syöttötappien ja moottorin ja virtalähteen integroinnin L293D: n välisiä yhteyksiä.
Virtayhteys: Kiinnitä virtalähde L293D: n tehotappiin.Muista, että Arduino UNO: n virtalähde saattaa olla riittämätön suoralle moottorivetolle, mikä edellyttää ulkoista virtalähdettä.
Arduino-L293D-yhteys: Käytetään hyppyjohtoja linkittämään Arduinon digitaaliset lähtötapit L293D: n syöttötappiin.Tämä asennus mahdollistaa ohjelmoitavan ohjauksen moottorin suunnasta ja nopeudesta.
Moottorin liitäntä: Kiinnitä moottorin johdot L293D: n lähtötapiin.Jos käytät useita moottoreita, varmista oikea yhteys jokaiseen L293D -kanavaan.
Arduino -ohjelmointi: Kehitä Arduino -koodi moottorin ohjaamiseksi.Tähän sisältyy tyypillisesti PIN -koodin alustus, PWM -arvon nopeudenhallinnan asettaminen ja moottorin pyörimissuunnan hallinta.
Testaus ja virheenkorjaus: Varmista ennen piirin virtaavaa huolellisesti kaikki yhteydet.Koodin jälkeinen uplatar arduinolle, testaa ja tarkkaile moottorin käyttäytymistä tekemällä säädöksiä ja optimointeja tarvittaessa.
Turvallisuustoimenpiteet: Varmista piirin turvallisuus käyttämällä sopivasti nimellistä virtalähdettä, välttämällä oikosulku riskejä ja sisällyttämällä sulakkeet tai virran rajoittajat tarvittaessa.
Yhteenveto
Lyhyesti sanottuna, moottorin kuljettajat ovat olennainen osa moderneja elektronisia järjestelmiä ja niistä on tullut hyvin yleistä, kun tekniikka on edennyt.H-siltapiiristä edistyneisiin integroiduihin piirinohjaimiin moottorin ohjaimen mallit kattavat laajan valikoiman teknologiatasoja erityyppisten moottorien ja sovellusvaatimusten mukaisesti.Toivomme, että tämä artikkeli on ollut sinulle hyödyllinen.Ota rohkeasti yhteyttä tähän artikkeliin tai mihin tahansa artikkeleihimme koskeviin kysymyksiin tai palveluihin.