TB6600HG askelmoottorin ohjain: tekniset tiedot, ominaisuudet ja sovellukset
Luettelo
TB6600HG Kuvaus

TB6600HG on PWM-hakkurin tyyppinen yksikerroksinen bipolaarinen sinimuotoinen mikromoottorin ohjain.Se voi saavuttaa eteenpäin ja käänteisen kiertoohjauksen 2-vaiheisen, 1-2-vaiheen, W1-2-faasin, 2W1-2-faasin ja 4W1-2-faasin viritysmoodien kautta.2-vaiheinen bipolaarinen askelmoottorit ohjataan yksinomaan pienellä värähtelyllä, korkean tehokkuuden kellosignaalilla.
Vaihtoehdot ja vastaavat:
Olla BD6290EFV-E2
Olla TB6600FG
Olla TB67S128FTG
Olla L6258EX
TB6600HG: n tekniset tiedot
• Osan tila: Aktiivinen
• Pakkaus: lokero
• Paketti / kotelo: HZIP-25
• Valmistaja: Toshiba
• Toimintavirta: 4,2 mA
• Toimintajännite: 2 V - 5,5 V
• Latausjännitteen luokitus: 8 V - 42 V
• Lähtöjen lukumäärä: 2 lähtöä
• PD - Tehon hajoaminen: 40 W
• Asennustyyli: Reiän läpi
• Pakkauksen pituus/leveys/korkeus: 29,3 mm (max) /4,5 mm/15,7 mm
• Tuoteryhmä: Moottori / liike- / sytytysohjaimet ja ohjaimet
TB6600HG: n käyttöolosuhteet
(TA = -30 ° C -85 ° C)
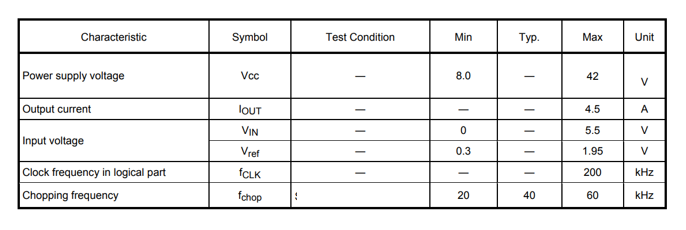
Huomaa: Kaksi VCC -päätettä tulisi ohjelmoida sama jännite.Käyttöalueen enimmäisvirtaa ei voida välttämättä suorittaa erilaisista olosuhteista riippuen, koska lähtövirtaa rajoittaa tehon hajoaminen PD.Vältä IC: n käyttöä tilassa, joka aiheuttaisi lämpötilan ylittämisen TJ (avg.) = 107 ° C.
Virtalähdejännite 42 V ja lähtövirta 4,5 A ovat toiminta -alueen maksimiarvoja.Suunnittele piiri, jolla on riittävästi tämä alueella, ottamalla huomioon virtalähteen vaihtelu, ulkoinen vastus ja IC: n sähköiset ominaisuudet.Jos virtalähdejännite ylittää 42 V ja lähtövirta 4,5 A, IC ei toimi normaalisti.
Kuinka yhdistää TB6600HG ohjausjärjestelmään?
Power Connection: Ensinnäkin, muista antaa asianmukainen virtalähde TB6600HG: lle.Kun TB6600HG virtaa, sinun on yleensä kytkettävä kaksi nastata: VCC (positiivinen virtalähde) ja GND (maadoitusjohto).VCC -nasta on vastuussa sirun ajamiseen tarvittavan jännitteen tarjoamisesta, kun taas GND -nasta toimii referenssimaahan.Meidän on varmistettava, että virtalähde on vakaa, ja se täyttää TB6600HG: n tekniset tiedot.
SIGNAL -yhteys: Ohjausjärjestelmän erityistarpeiden mukaan meidän on kytkettävä ohjaussignaali TB6600HG -ohjainpiirin vastaavaan PIN -koodiin.Nämä ohjaussignaalit sisältävät yleensä suunnanhallintasignaalit ja askelpulssisignaalit jne., Jotka ovat vastuussa moottorin toiminnan ohjaamisesta, mukaan lukien pyörimissuunta ja pyörimisnopeus.
Moottoriyhteys: Meidän on oltava erityisen varovaisia, kun kytket moottoria TB6600HG -ohjaimen siruun.Moottorin kaksi johtoa, yleensä punainen ja musta, edustavat moottorin positiivisia ja negatiivisia napoja.Punainen johdin liittyy yleensä moottorin positiiviseen nauhaan, kun taas musta lanka kytkeytyy negatiiviseen nauhaan.
Palauteyhteys (valinnainen): Jos kooderia käytetään palautteen hallintaan, meidän on myös kytkettävä kooderin lähtösignaali ohjausjärjestelmään.Tämä sisältää tyypillisesti vaiheen A, vaiheen B ja vaiheen z: n lähtöt (jos saatavilla).
Maadoitus: Meidän on varmistettava, että kaikkien laitteiden yhteinen maadoitusjohto on kytketty oikein häiriöiden ja vaurioiden välttämiseksi.
Alustusasetukset: Kun yhteys on valmis, meidän on alustettava TB6600HG: n asetukset varmistaaksemme, että se toimii oikein.Tämä voi sisältää virranrajojen asettamisen, askelmuodot jne.
TB6600HG -tuoteominaisuudet
• Hyväksy laajentunut jäähdytin hyvän lämmön hajoamiseksi
• Alajakoasennusohjeet tulostetaan levyn takaosaan
• Lähtöjen oikosulun suojaustoiminnolla huoleton käyttö
• Hyväksy 6N137 Nopea optinen kytkentä suuren nopeuden varmistamiseksi ilman synkronointia
• Lähtövirta on vaihdettavissa erilaisten sovellustarpeidesi tyydyttämiseksi
• Yleisen anodin syöttötilan avulla syöttöliittimiä on kaksi, mikä tekee johdoista helpompaa
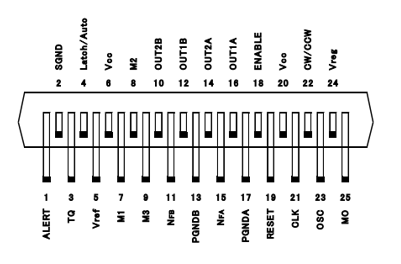
TB6600HG: n nastakokoonpano
TB6600HG: n toiminnon kuvaus
Viritysasetukset
Virhetila voidaan valita seuraavista kahdeksasta tilasta käyttämällä M1-, M2- ja M3 -tuloja.Kun M1-, M2- tai M3 -tuloja siirretään moottorin toiminnan aikana, uusi viritystila alkaa alkuperäisestä tilasta, mikä mahdollisesti häiritsee lähtövirran aaltomuodon jatkuvuutta.
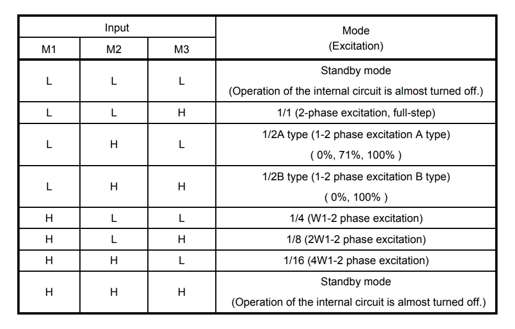
HUOMAUTUS: Jos haluat muuttaa jännittävää tilaa muuttamalla M1, M2 ja M3, varmista, ettet aseta M1 = M2 = M3 = L tai M1 = M2 = M3 = H.
Valmiustila
Käyttötila siirtyy valmiustilaan tilassa M1 = M2 = M3 = L tai M1 = M2 = M3 = H. Virrankulutus minimoituu sammuttamalla kaikki toiminnot paitsi suojaustoimenpide.Valmiustilassa lähtöpääte MO on Hz.Valmiustila vapautuu muuttamalla M1 = M2 = M3 = L ja M1 = M2 = M3 = H muussa tilassa.Tulosignaali ei hyväksytä noin 200 μs valmiustilan vapauttamisen jälkeen.
Rappeutumistila
Virran lataaminen ja purkaminen PWM -tilassa vaatii tyypillisesti noin viisi jaksoa OSCM: ssä.40 prosentin nopea rappeutumistila aloitetaan indusoimalla rappeutumista nopean rappeutumismoodin kahden viimeisen syklin sisällä, ja suhde 40 prosenttia on jatkuvasti kiinteä.Pääkellotaajuuden (FMCLK), OSCM -taajuuden (FOSCM) ja PWM -taajuus (FCHOP) välinen suhde esitetään seuraavasti:
foscm = 1/20 × FMCLK
FCHOP = 1/100 × FMCLK
Kun ROSC = 51 kΩ, pääkello = 4MHz, OSCM = 200 kHz, PWM: n (FCHOP) = 40 kHz.
Alkutila
Kun nollausta käytetään, vaihevirrat ovat seuraavat.
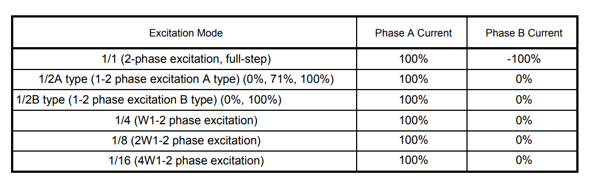
Nykyinen suunta määritetään seuraavasti.
Out1a → out2a: eteenpäin suuntautuva suunta
Out1b → out2b: eteenpäin suuntautuva suunta
TB6600HG: n soveltaminen
Alla on lueteltu joitain TB6600HG -sovelluksia.
• Takavalot
• Vieraanvaraisuusrakennukset
• Suuri ulkoilma LED -näyttö
• Vaihtoehto piilotetuille valoille
• Teollisuus High Bay -valot
• Suurimuotoinen LED -taustavalo
• Näytä LED -taustavalo
• Kamera-yhteensopivat älypuhelimet
• asteittainen tai alaspäin kuljettajan topologiat
TB6600HG: n yleiset viat ja ratkaisut
Seuraavassa luetellaan joitain yleisiä vikoja TB6600HG: stä ja niiden ratkaisuista, jotka auttavat sinua ryhtymään nopeaan toimintaan kohdatessasi vikoja ja suojaamaan laitteen normaalia toimintaa.
Vika yksi: kuljettajan siru ylikuumeneminen
Itse TB6600HG -siru on liian kuuma, luultavasti johtuen liiallisesta kuormasta tai huonoista lämmön hajoamisolosuhteista.
Ratkaisu: Paranna lämmön hajoamista
Meidän on lisättävä jäähdytysaltaat tai puhaltimet kuljettajan sirulle ja moottorille varmistaaksemme, että ne voivat kokonaan hajottaa lämpöä työskennellessään.Samanaikaisesti meidän on pidettävä ympäristö kuljettajan sirun ja moottorin ympärillä hyvin tuuletettuna ylikuumenemisen välttämiseksi.
Vika kaksi: moottori pyörii väärään suuntaan
Kun moottori on vastaanottanut käyttösignaalin, pyörimissuunta ei ole odotettavissa olevien kanssa, se voi olla, että ohjaussignaali on väärä tai käyttöpiiri -sirua ei ole määritetty oikein.
Ratkaisu: Tarkista ohjaussignaali
Meidän on tarkistettava huolellisesti TB6600HG: lle lähetetyt ohjaussignaalit varmistaaksemme, että suunnan ohjaussignaali ja pulssisignaali ovat oikeat.Jos mikrokontrolleria käytetään signaalien lähettämiseen, tarkista ohjelmakoodi ja PIN -määritykset.
Vika kolme: Moottori ei pyöri
Moottori ei reagoi käyttösignaalin vastaanottamisen jälkeen, voi olla, että kuljettajan siru ei toimi kunnolla tai moottorin ja kuljettajan sirun välisessä yhteydessä on ongelma.
Ratkaisu: Tarkista virtalähde ja yhteys
Meidän on varmistettava, että TB6600HG: n virtalähde on normaali ja moottorin ja kuljettajan sirun välinen yhteys on kiinteä.Tarkistamme piirin jännitteen ja virran käyttämällä yleismittaria varmistaaksemme, että ne ovat normaalilla alueella.
Vika neljä: vakava moottorin lämmitys
Moottori tuottaa liiallisen lämmön käytön aikana, mikä voi johtua liiallisesta virran tai huonon lämmön hajoamisesta.
Ratkaisu: Säädä nykyinen asetus
Jos moottori tuottaa vakavaa lämpöä, voimme yrittää vähentää ohjaimen sirun lähtövirtaa.Säätämällä TB6600HG: n virran asetustapin, voimme tehokkaasti rajoittaa lähtövirran koon, mikä puolestaan vähentää moottorin taakkaa ja varmistaa moottorin vakaan ja turvallisen käytön.
Usein kysyttyjä kysymyksiä [UKK]
1. Mikä on TB6600HG: n käyttölämpötila -alue?
TB6600HG: n käyttölämpötila vaihtelee -30 ° C -85 ° C.
2. Mikä on TB6600HG?
TB6600HG on eräänlainen askelmoottorin ohjain, joka on suunniteltu hallitsemaan askelmoottoreita erilaisissa sovelluksissa, kuten CNC -koneissa, 3D -tulostimissa, robotti- ja automaatiojärjestelmissä.
3. Mitkä ovat TB6600HG: n keskeiset piirteet?
TB6600HG-ominaisuuksiin kuuluvat säädettävä moottorin virta, vaiheen resoluutioasetukset, sisäänrakennettu ylikuumenemissuojaus ja opto-eristettyjä tuloja signaalin hallintaa varten.