Stepper Motor Wire Guide - värikoodit, kytkentätavat
Kun joudut ensimmäisen kerran kosketukseen askelmoottorin kanssa, huomaat, että moottorilla on useita erilaisia värillisiä johtoja.Näitä värejä ei ole valittu satunnaisesti, vaan noudattaa tiettyjä teollisuusstandardeja, jotka auttavat teknikkoja tunnistamaan nopeasti ja liittämään moottorikelat oikein.Vaikka valmistajien välillä voi olla pieniä eroja, useimmat askelmoottorin langan värikoodit ovat jonkin verran yleisiä.Tässä artikkelissa keskustellaan värikoodista, johdotusmenetelmistä ja siitä, miten askelmoottorien vaiheet voidaan tunnistaa.Luettelo:
1. Mitä askelmoottorin langan värikoodit edustavat?
Stepper -moottorit osoittavat, kuinka kelat on kytketty niiden langan värikoodilla.Usein eri valmistajat voivat käyttää erilaisia värikoodauksia, mutta suurimmaksi osaksi nämä värikoodit seuraavat teollisuuden vakiokäytäntöjä.Näiden värikoodien ymmärtäminen on ensimmäinen askel optimaalisen suorituskyvyn saavuttamiseen moottoristasi.
2. Stepper -moottorin johdinvärikoodi
Stepper Motor Wire -värikoodit ovat avain oikeiden liitännäisten saavuttamiseen, etenkin sovelluksissa, jotka vaativat moottorin liikkeen tarkkaa hallintaa.Vaikka värikoodit voivat vaihdella hiukan valmistajasta valmistajalle, useimmat seuraavat jonkinlaista teollisuusstandardia.
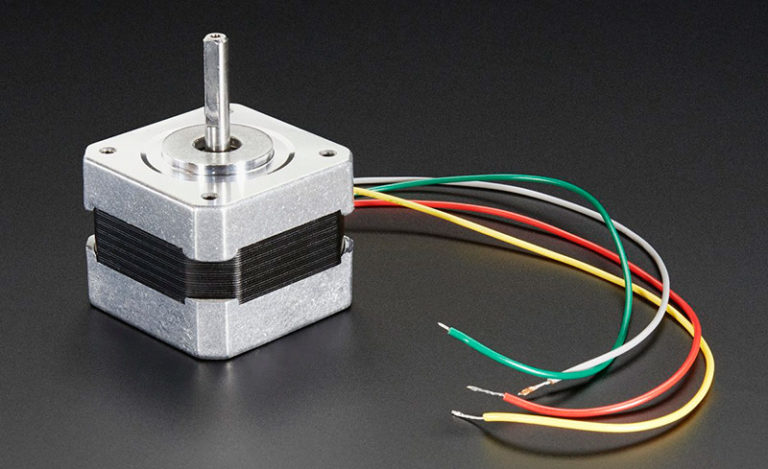
Askelmoottorin johdottaessa sinun on ensin määritettävä, mitkä johdot ovat "pariksi".Nämä parit vastaavat yleensä moottorin erilaisia keloja, kuten kela "A" ja kela "B".Käytännössä tämä saattaa tarkoittaa tiettyihin keloihin kytkettyjen värikoodattujen johtojen tunnistamista.Esimerkiksi:
Punaiset ja siniset johdot on yleensä merkitty vastaavasti A -kelan ja B -kelan positiivisiksi yhteyksiksi.
Vihreä ja musta vastaavat näiden kelojen negatiivisia napoja.
Toimiessasi sinun ei tarvitse kiinnittää liikaa huomiota mustan/vihreän tai vihreän/mustan nastajärjestykseen, on tärkeämpää yhdistää johdot oikein samaan toimintoon.Esimerkiksi kaikkien positiivisten johtojen asettaminen (punainen, sininen) toiselle puolelle ja kaikki negatiiviset johdot (vihreät, mustat) toiselle puolelle auttaa yksinkertaistamaan johdotusprosessia ja vähentämään virheitä.
3. Kuinka kytkeä askelmoottorin johdot
Askelmoottorin johdotusmenetelmä määrittää suoraan sen suorituskyvyn ja sovellettavat skenaariot.Eri johdotuskokoonpanojen erityisten sovellusten ja teknisten yksityiskohtien ymmärtäminen on avain motorisen suorituskyvyn optimaaliseen saavuttamiseen.Seuraava on yksityiskohtainen analyysi kolmesta yleisestä moottorin johdotusmenetelmästä:
4-johdin askelmoottori
4-johdinvarustemoottorit ovat yleisin kokoonpano, etenkin sovelluksille, jotka eivät vaadi liiallista monimutkaisuutta.Jokaisessa vaiheessa (A ja B) on kaksi johtoa, yleensä merkitty A ja A ', B ja B'.
Yhteyksiä tehdessään on avain löytää kaksi johtoa jokaisesta vaiheesta ja kytkeä ne oikein ohjaimen vastaavaan ulostuloon.Tämän kokoonpanon intuitiivista on sen yksinkertaisuus, sinun ei tarvitse huolehtia keskikeskuksista tai ylimääräisistä johdotuskomplikaatioista.Yleisin virhe on yhdistää A-vaihe- ja B-vaihejohdot väärin, mikä voi aiheuttaa moottorin värähtelyn tai kääntymisen väärään suuntaan.
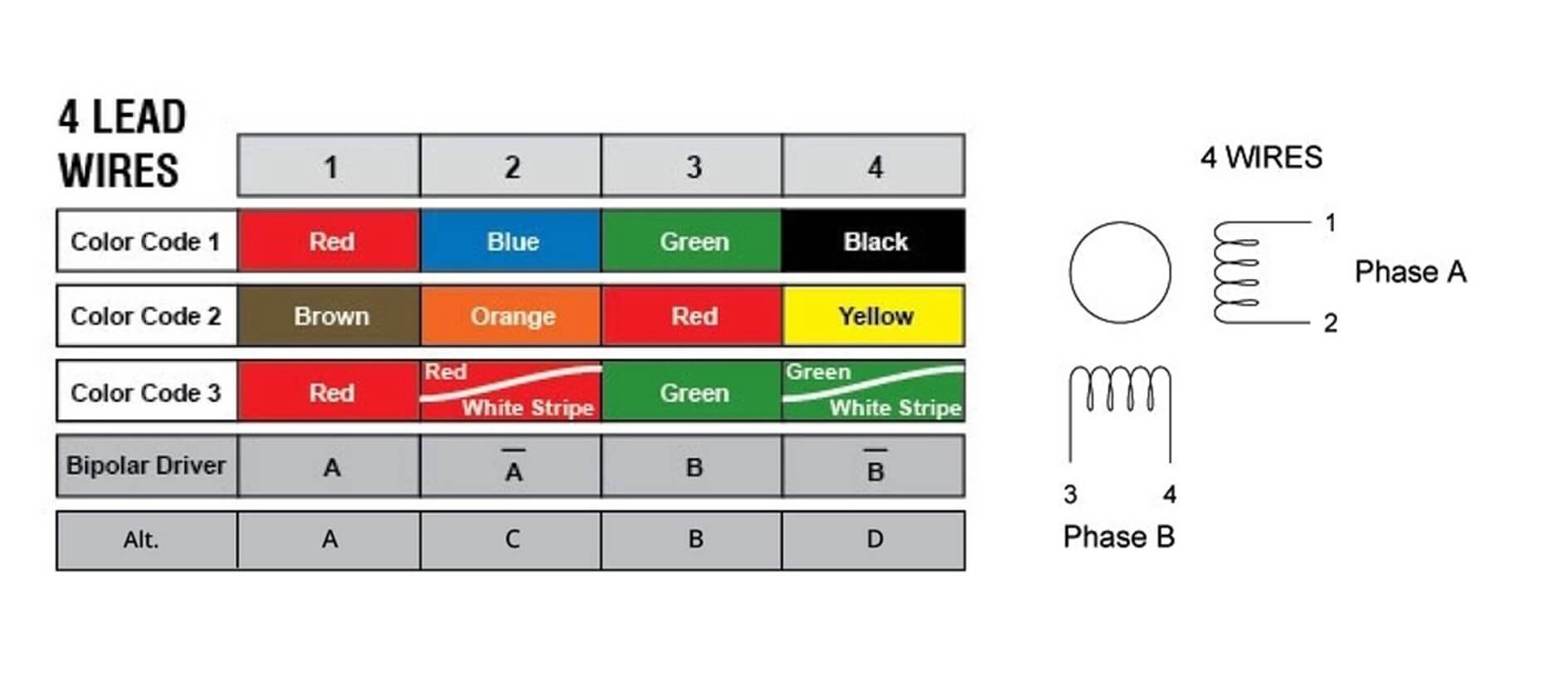
6-johtiminen askelmoottori
6-johtimoiden askelmoottorien rakenne on samanlainen kuin 4-johtiminen, mutta 6-johtiminen askelmoottorit lisäävät keskikohdat kunkin vaiheen kumpaankin päähän, mikä mahdollistaa unipolaarisen johdotuksen käytön joissakin kokoonpanoissa, mikä voi tarjota suuremman vastus pienellä nopeudella.vääntömomentti.
Keskikeskuksen tunnistaminen ja niiden käytön päättäminen on avain tämän tyyppisen johdotuksen kanssa.Kun et käytä keskusnauhaa, voit yksinkertaisesti jättää sen tyhjäksi ja käyttää 6-johdin moottoria 4-johtimana moottorina, mutta tunnistaminen, mitkä johdot ovat keskikohdan langat, on välttämätöntä välttää liitäntävirheitä.
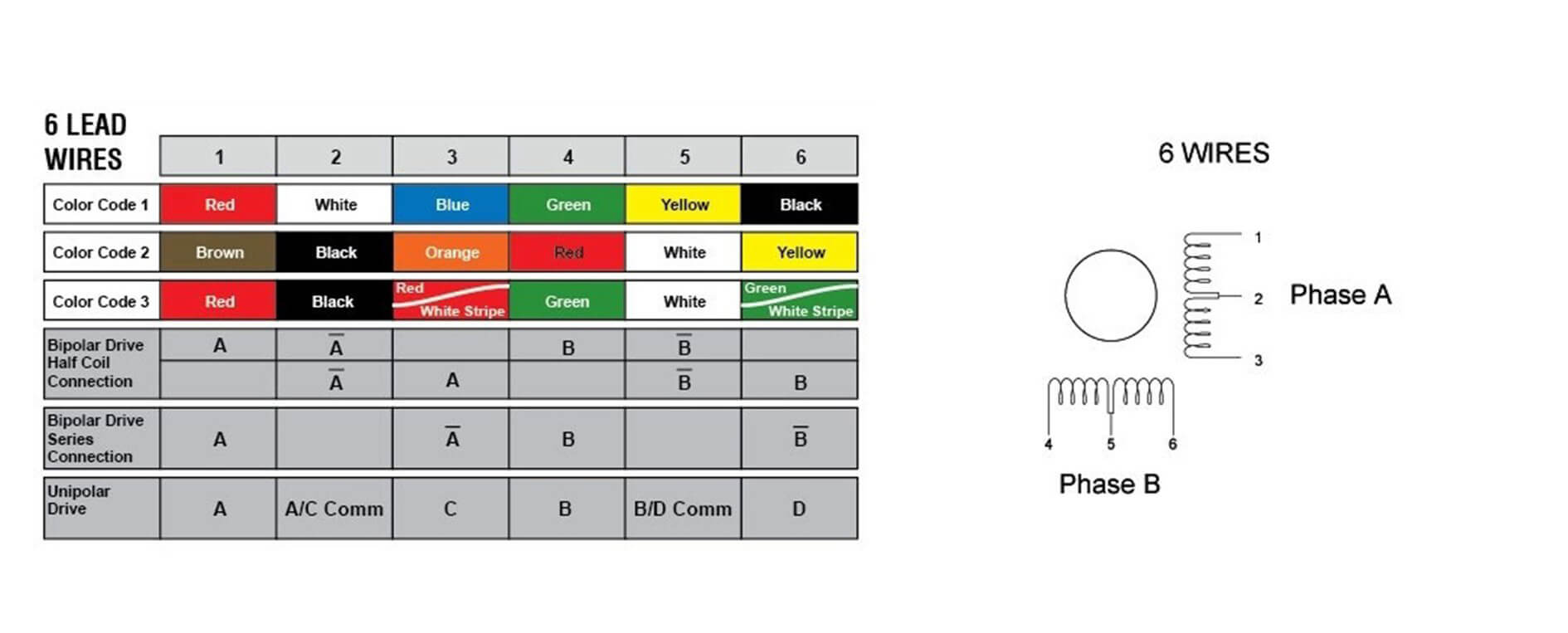
8-johdin askelmoottori
8-johtiminen Stepper-moottorit tarjoavat maksimaalisen joustavuuden moottorin nopeuden ja vääntömomentin ominaisuuksien optimoimiseksi eri kokoonpanojen kautta (sarja tai rinnakkainen).Haaste 8-johdin kokoonpanon johdotuksella on parhaan johdotusmenetelmän päättäminen.Sarjan kokoonpano tarjoaa suuremman vääntömomentin nopeuden kustannuksella, kun taas rinnakkaiskokoonpano on päinvastoin.Sovelluksissa, jotka vaativat moottorin suorituskyvyn hienosäätöä, näiden kokoonpanojen ymmärtäminen ja toteuttaminen, voi vaatia yksityiskohtaisempaa sähkötietoa.
4. Miksi sinun on tiedettävä askelmoottorin johtimien väri
Askelmoottorin lankaväri ei ole vain yksinkertainen värimerkki, mutta jokaisella värillä on erityinen merkitys, joka liittyy suoraan moottorin käyttötehokkuuteen ja suuntaohjaukseen.Näiden värikoodien hallitseminen on perusta sen varmistamiselle, että askelmoottori voi toimia suunnitteluvaatimusten mukaisesti.Väärät johdotusliitännät voivat aiheuttaa moottorin toimintahäiriöitä tai jopa vahingoittaa moottoria.
5. Kuinka tunnistaa askelmoottorivaiheet - kelaparit
Askelmoottorin oikea toiminta riippuu johdinparin tarkkuudesta.Toisinaan värikoodi voi olla epätarkka tai vaikeaa lukea ikääntyvässä moottorissa, jolloin on tarpeen luottaa suorempiin fyysisiin testauksiin kelaparin tunnistamiseksi.Voit yhdistää askelmoottorin johdot kahdella tavalla:
Käytä monimittaria vastuskestävyyden havaitsemiseksi
Ymmärrä vastustestauksen perusperiaatteet:
Kunkin vaiheen kahden johdon tulisi näyttää pieni määrä vastus (yleensä muutama ohmi) niiden välillä, mikä osoittaa, että ne on kytketty samaan kelaan.Sitä vastoin johtimilla eri vaiheiden välillä ei saa olla vastus (ts. Ei jatkuvuutta).
Erityiset vaiheet:
Aseta yleismittari vastusasetukseen.
Mittaa resistenssi kahden viivan välillä, jotka näyttävät olevan vaiheessa.
Tallenna kunkin johtimiparin vastusarvo varmistaaksesi, kuuluvatko ne samaan vaiheeseen.Tyypillisesti saman vaiheen johdinparit osoittavat samanlaisia vastusarvoja, kuten 2,8 ohmia XYZ -moottorille ja 2,6 ohmia suulakepuristimen moottorille.
Askelmoottorivaiheiden mekaaninen testaus
Kuinka käyttää kierto -akselin testi:
Kun moottori ei ole kytketty mihinkään asemaan tai virtalähteeseen, kierrä moottorin akseli manuaalisesti ja tunnet sen vapaan pyörimisen vastus.
Valitse johdin pari oikosulkua varten ja yritä pyörittää moottorin akselia uudelleen.
Jos pyörivän akselin vastus kasvaa merkittävästi, se tarkoittaa, että kaksi johtoa kuuluvat samaan vaiheeseen;Jos vastus ei muutu merkittävästi, irrota johtimipari, valitse toinen pari ja yritä uudelleen.
Kun suoritat kierto -akselitestiä, operaattori tuntee selkeän eron tunneessa.Kun johdot on oikosulottu oikein, akselin vastus kasvaa magneettikentän muutosten vuoksi, mikä antaa operaattorille selkeän fyysisen palautteen, joka on erittäin intuitiivinen.Tämä testi ei vain varmista, että johdot ovat samassa vaiheessa, vaan tarjoaa myös yleisen osoituksen kelan eheydestä.
6. Mitä tapahtuu, jos askelmoottori ei ole kytketty oikein?
Moottori ei pyöri:
Askelmoottorin on vastaanotettava virta kuljettajan kautta tietyssä järjestyksessä ja jännitteen ajamisessa.Jos johdot eivät ole kunnolla kytketty vastaaviin käyttöliittimiin, virta ei voi virtaa moottorin käämien läpi estäen moottorin käynnistyksen.
Moottorin kiertovirhe:
Askelmoottorin kierto riippuu sen käämien aktivointisekvenssistä.Jos kahden kelaparin johdot vaihdetaan, se aiheuttaa vaihesekvenssin väärin, aiheuttaen moottorin kääntymisen väärään suuntaan.
Moottorin häirintä tai värähtely:
Epävakaat tai löysät lankayhteydet vaikuttavat moottorin vastaanottaman virran stabiilisuuteen, aiheuttaen moottorin epätasaisesti, ilmenee häiritsevänä tai värähtelynä.
Moottorin ylikuumeneminen:
Johdotusvirheet voivat aiheuttaa liiallisen virran moottorin käämissä tai virheellisissä vaihesekvensseissä.Pitkäaikainen toiminta tuottaa liiallista lämpöä, mikä aiheuttaa moottorin lämpötilan nousun, mikä voi vahingoittaa eristyskerroksia tai muita komponentteja.
Vahinko moottorin ohjaimelle:
Jos virheellinen johdotus johtaa oikosulkuon, suuri hetkellinen virta voi vahingoittaa moottorin ohjaimen elektronisia komponentteja.
7. Yhteenveto
Askelmoottorin langan värikoodien ja johdotustekniikoiden ymmärtäminen ja oikein soveltaminen on tärkeää tietoa moottorin suorituskyvyn ja turvallisen käytön varmistamiseksi.Oikeat tiedot ja taidot ovat avain laitteiden vian estämiseen ja toiminnan tehokkuuden parantamiseen.Ne ovat myös teknisen innovaatioiden ja käytännön kehityksen liikkeellepaneva voima.Jos haluat tietää enemmän askelmoottoreista tai sinulla on kysyttävää, ota rohkeasti yhteyttä.
Usein kysyttyjä kysymyksiä [UKK]
1. Mitä tapahtuu, jos askelmoottori on johdotettu väärin?
Jos askelmoottori ei ole kytketty oikein, se voi aiheuttaa erilaisia ongelmia.Ensinnäkin moottori ei välttämättä käytä ollenkaan, koska virta ei kulkea moottorin kelojen läpi oikein.Toiseksi moottori voi kulkea taaksepäin tai pyöriä väärään suuntaan johtuen kytkien välisestä vaihesekvenssistä, joka on kytketty taaksepäin.Vielä pahempaa, moottori voi väristyä, lämmittää tai jopa polttaa, jos johdot on kytketty väärin aiheuttaen oikosulun tai ylikuormituksen.
2. Pitääkö askelmoottoreita maadoitettava?
Askelmoottorien itse ei yleensä tarvitse maadoittua, koska heidän virtalähteensä ja kuljettajansa ovat yleensä jo asianmukainen maadoitus.Maadoitus on kuitenkin välttämätön turvatoimenpide, etenkin suurissa mekaanisissa laitteissa, ja sen varmistaminen, että kaikki sähköjärjestelmät ovat maadoitettuja, estävät vahingossa tapahtuvia sähköiskuja ja sähköhäiriöitä.
3. Kuinka voin kertoa, onko askelmoottori unipolaarinen vai bipolaarinen?
Suurin ero yksisopimuksen askelmoottorin ja bipolaarisen askelmoottorin välillä on tapa, jolla kelat ovat langallisia ja käyttövaatimukset.Unipolaarisilla moottoreilla on keskikanava, joka voidaan kytkeä erikseen, kun taas bipolaarisilla moottoreilla ei ole keskimmäistä hanan ja kuljettajan on ohjattava niiden kelojen molemmilla päillä.
4. Mitkä ovat askelmoottorin positiiviset ja negatiiviset navat?
Askelmoottorin positiivisten ja negatiivisten napojen tunnistaminen liittyy yleensä moottorin ohjaukseen, etenkin bipolaarisissa moottoreissa.Kunkin kelan toinen pää on positiivinen ja toinen on negatiivinen.