MPU-6050 toiminnassa: Käytännöllinen opas asetuksiin, kokoonpanoihin ja melunhallintaan
Luettelo
Johdanto MPU-6050: een
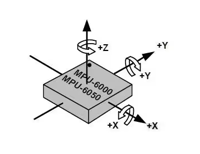
MPU-6050 on maailman ensimmäinen integroitu 6-akselin liikkeenkäsittelykomponentti, joka integroi 3-akselisen gyroskoopin, 3-akselin kiihtyvyysanturin ja skaalautuvan digitaalisen liikkeen prosessorin (DMP).Sen käytön tarkoituksena on saada mitattavan esineen kallistuskulma (kuten nelikopteri, tasapainottava auto) X-, Y- ja Z -akseleilla, ts. Penke -kulma, rullakulma ja keitekulma kulma.Luimme MPU-6050: n kuusi tietoa (kolmen akselin kiihtyvyyden AD-arvo ja kolmen akselin kulmanopeuden AD-arvo) I2C-rajapinnan kautta.Asennon fuusion käsittelyn jälkeen voidaan laskea sävelkorkeus, rulla- ja kääntökulmat.Mittausarvojen suuntaviitteenä anturin koordinaattisuunnan määritelmä on alla olevan kuvan mukainen, joka seuraa oikeakätisen koordinaattijärjestelmän periaatetta (ts. Oikea peukalo osoittaa X-: n positiiviseen suuntaanAkseli, etusormi osoittaa y-akselin positiiviseen suuntaan ja keskisormi osoittaa Z-akselin positiiviseen suuntaan).
Omistetulla I2C-anturiväylällä MPU-6050 pystyy vastaanottamaan tuloa suoraan ulkoisesta 3-akselikompassista, tarjoamalla täydellisen 9-akselisen liikkeen Fusion ™ -lähtö.Se eliminoi ristiriitaisen ongelman yhdistetyn gyroskoopin ja kiihdyttimen aikajanan välillä ja vähentää merkittävästi pakkaustilaa verrattuna monikomponenttisiin ratkaisuihin.Kun se on kytketty kolmen akselin magnetometriin, MPU-60x0 pystyy tarjoamaan täydellisen 9-akselin liikkeen fuusiotuotannon pää I2C- tai SPI-porttiin (huomaa, että SPI-portti on saatavana vain MPU-6000: lla).
Vaihtoehdot ja vastaavat
Olla AIS328DQTR
Olla ICM-20689
• MPU-3300
Olla MPU-6000
Olla MPU-6500
MPU-6050: n valmistaja
MPU-6050: n valmistaja on TDK.Kahden TDK: n perustajan, tohtori Yogoro Katon ja Tooi Tooin, keksivät Ferriitin Tokiossa, he perustivat Tokyo Denkikagaku Kogyo K.K.Vuonna 1935. Globaalina elektroniikkateollisuusbrändinä TDK on aina pitänyt hallitsevaa asemaa elektronisten raaka -aineiden ja elektronisten komponenttien aloilla.TDK: n kattava ja innovaatiovetoinen tuotevalikoima kattaa passiiviset komponentit, kuten keraamiset kondensaattorit, alumiinielektrolyyttiset kondensaattorit, kalvokondensaattorit, magneettiset tuotteet, korkean taajuuden komponentit, pietsosähköiset ja suojauslaitteet, samoin kuin anturit ja anturit (kuten lämpötila ja paine, paine, paine, paine,Magneettiset ja MEMS -anturit) jne. Lisäksi TDK tarjoaa myös virtalähteet ja energialaitteet, magneettiset päät ja muut tuotteet.Sen tuotemerkkejä ovat TDK, EPCOS, Invensense, Micronat, Tronics ja TDK-Lambda.
MPU-6050: n sisäinen lohkokaavio
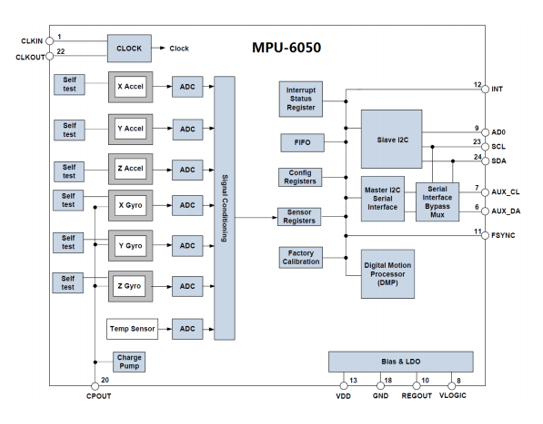
Niistä SCL ja SDA ovat IIC-rajapintoja, jotka on kytketty MCU: hon, ja MCU hallitsee MPU-6050: tä tämän IIC-rajapinnan kautta.Siellä on myös IIC -käyttöliittymä, nimittäin aux_cl ja aux_da.Tätä käyttöliittymää voidaan käyttää ulkoisten orjalaitteiden, kuten magneettianturien, yhdistämiseen yhdeksän akselin anturin muodostamiseksi.Vlogic on IO -porttijännite.Tämä nasta voi tukea vähintään 1,8 V.Yhdistämme sen yleensä suoraan VDD: hen.AD0 on orja IIC -rajapinnan osoitteenohjaustappi (kytketty MCU: hon).Tämä PIN -koodi hallitsee IIC -osoitteen alhaisinta bittiä.Jos se on kytketty GND: hen, MPU-6050: n IIC-osoite on 0x68;Jos se on kytketty VDD: hen, se on 0x69.Huomaa, että tässä osoite ei sisällä alhaisinta tiedonsiirtoa (alhaisin bittiä käytetään luku- ja kirjoitustoimintojen edustamiseen).MWBalanceDSTC15: ssä AD0 on kytketty GND: hen, joten MPU-6050: n IIC-osoite on 0x68 (lukuun ottamatta alhaisin bittiä).
Alusta IIC -käyttöliittymä
MPU-6050 käyttää IIC: tä kommunikoidakseen STC15: n kanssa, joten meidän on ensin alustettava SDA- ja SCL-dataviivat, jotka on kytketty ensin MPU-6050: een.
Nollaa MPU-6050
Tämä vaihe palauttaa kaikki rekisterit MPU-6050: n sisällä oletusarvoihinsa, jotka saavutetaan kirjoittamalla 1-7-7-7-7-7 (0x6b) bitti 7.Palautuksen jälkeen virranhallintarekisteri 1 palautetaan oletusarvoon (0x40), ja tämän rekisterin on myöhemmin asetettava arvoon 0x00 MPU-6050: n herättämiseksi ja asetettava se normaaliin työtilaan.
Aseta kulmanopeusanturin (gyro) ja kiihtyvyysanturin täysimittainen alue
Tässä vaiheessa asetamme kahden anturin täysimittaisen alueen (FSR) gyroskoopin konfigurointirekisterin (0x1b) ja kiihtyvyysanturin konfigurointirekisterin (0x1c) kautta.Tyypillisesti asetamme gyroskoopin täysimittaisen alueen ± 2000 dps ja kiihtyvyysmittarin täysimittainen alue ± 2G: ksi.
Aseta muut parametrit
Tässä on myös määritettävä seuraavat parametrit: sammuta keskeytykset, poista AUX I2C -rajapinta käytöstä, poista FIFO käytöstä, aseta gyroskoopin näytteenottotaajuus käytöstä ja määritettävä digitaalinen alhaisen pääsyn suodatin (DLPF).Koska emme käytä keskeytyksiä tietojen lukemiseen tässä luvussa, keskeytystoiminto on kytkettävä pois päältä.Samanaikaisesti, koska emme käytä AUX I2C -liittymää muiden ulkoisten anturien yhdistämiseen, meidän on myös suljettava tämä käyttöliittymä.Näitä toimintoja voidaan hallita COLTRUPT ENABLE REKISTORIA (0x38) ja käyttäjän ohjausrekisterin (0x6a) kautta.MPU-6050 voi käyttää FIFO: ta anturitietojen tallentamiseen, mutta emme ole käyttäneet sitä tässä luvussa, joten kaikki FIFO-kanavat on suljettava.Tätä voidaan ohjata FIFO Enable Registerin (0x23) kautta.Oletusarvoisesti tämän rekisterin arvo on 0 (ts. FIFO on poistettu käytöstä), joten voimme käyttää oletusarvoa suoraan.Gyroskoopin näytteenottoastetta säädetään näytteenottotaajuuden jakajarekisterillä (0x19).Normaalisti asetamme tämän näytteenottotaajuuden arvoon 50. Digitaalisen alhaisen pääsyn suodattimen (DLPF) kokoonpano on valmis konfigurointirekisterin (0x1a) kautta.Yleisesti ottaen asetamme DLPF: n puoleen kaistanleveydestä tasapainottaaksesi tietojen tarkkuutta ja vasteen nopeutta.
Määritä järjestelmän kellolähde ja ota kulmanopeusanturi ja kiihtyvyysanturi käyttöön
Järjestelmäkellolähteen asetus riippuu virranhallintarekisteristä 1 (0x6b), jossa tämän rekisterin kolme alhaisinta bittiä määrittävät kellolähteen valinnan.Oletusarvoisesti nämä kolme bittiä asetetaan arvoon 0, mikä tarkoittaa, että järjestelmä käyttää kellonlähteenä sisäistä 8MHz RC -oskillaattoria.Kellon tarkkuuden parantamiseksi asetamme sen usein arvoon 1 ja valitsemme kellolähteenä x-akselin gyroskooppi PLL.Lisäksi kulmanopeusanturin ja kiihtyvyysanturin mahdollistaminen on myös tärkeä vaihe alustusprosessissa.Molemmat toiminnot toteutetaan virranhallintarekisterin 2 (0x6c) kautta.Aseta vastaava bitti arvoon 0 vain aktivoidaksesi vastaavan anturin.Yllä olevat vaiheet suoritettuaan MPU-6050 voi siirtyä normaaliin työtilaan.Ne rekisterit, jotka eivät ole erityisesti asetettuja, omaksuvat järjestelmän oletusarvot esiasettavat.
Kuinka MPU-6050 toimii?
Gyro -anturi
Anturi on varustettu gyrolla, joka pysyy aina yhdensuuntaisesti alkuperäisen suunnan kanssa gyroskooppisesta vaikutuksesta.Siksi voimme laskea pyörimissuunnan ja kulman havaitsemalla gyron poikkeaman alkuperäisestä suunnasta.
Kiihtyvyysanturi
Kiihtyvyysanturi on laite, joka voi mitata kiihtyvyyttä ja se toimii pietsosähköisen vaikutuksen periaatteen perusteella.Kiihtyvyyden aikana anturi mittaa massalohkoon kohdistetun inertiaalisen voiman ja laskee sitten kiihtyvyysarvon Newtonin toista lakia käyttämällä.
Digitaalinen liikeprosessori (DMP)
DMP on MPU6050-sirun tietojenkäsittelymoduuli, jolla on sisäänrakennettu Kalman-suodatusalgoritmi gyroskoopin ja kiihtyvyysantujen tietojen hankkimiseksi ja lähtökriaatioiden käsittelemiseksi.Tämä ominaisuus vähentää huomattavasti perifeerisen mikroprosessorin työmäärää ja välttää tylsiä suodatus- ja data -fuusioprosessia.
Huomautuksia:
Quaternions: Kvaternionit ovat yksinkertaisia superkompleksinumeroita.Kompleksinumerot koostuvat todellisista numeroista plus kuvitteellinen yksikkö I, missä i^2 = -1.
Missä MPU-6050 käytetään?
• Lelut
• Luuri ja kannettava pelaaminen
• Liikepohjaiset peliohjaimet
• Blurfree ™ -teknologia (video/still -kuvanvakaus)
• AirSign ™ -teknologia (turvallisuutta/todennusta varten)
• INTREMESTESTURE ™ IG ™ -eleen tunnistus
• Pudottavat anturit terveyden, kuntoon ja urheiluun
• Liiketoimintapeli- ja sovelluskehys
• MotionCommand ™ -tekniikka (eleiden oikotiet)
• Sijaintipohjaiset palvelut, kiinnostuksen kohteet ja kuollut laskenta
• 3D-kaukosäätimet Internet-kytkettyihin DTV: iin ja asetettuihin ruutuihin, 3D-hiiriin
• Touchanywherwhere ™ -teknologia (”ei kosketa” käyttöliittymän sovelluksen ohjausta/navigointia varten)
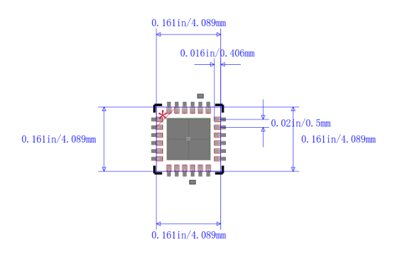
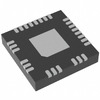
MPU-6050: n paketti
Kuinka vähentää MPU-6050: n melua?
Voimme käyttää seuraavia tapoja vähentää MPU-6050: n melua:
Käytä kalibroidut anturit: MPU-6050: n kiihtyvyysmittarin ja gyroskoopin kalibrointi voi eliminoida itse anturien vääristymisen ja virheen vähentäen siten melun vaikutusta.Kalibrointiprosessi koostuu yleensä kahdesta vaiheesta: staattinen kalibrointi ja liikkeen kalibrointi.
Laitteistosuodatusprosessi: Suodatinkondensaattorien lisääminen MPU-6050: n sähkölinjaan voi vähentää anturin virtalähteen kohinan vaikutusta.Samaan aikaan meidän pitäisi yrittää pitää MPU-6050 poissa mahdollisista häiriölähteistä, kuten korkeataajuussignaalilinjoista ja suuritehoisista komponenteista.
Ohjelmistosuodatuskäsittely: Kun Raakadata on kerätty MPU-6050: stä, voimme lisätä ohjelmiston suodatuslinkin alkutiedot esikäsittelemään kohinan aiheuttamien häiriöiden poistamiseksi.Yleisesti käytettyjä ohjelmistojen suodatusmenetelmiä ovat keskimääräinen suodatus, mediaani suodatus, Kalman -suodatus ja niin edelleen.
Käytä sisäistä alhaisen pääsyn suodatinta: MPU-6050: llä on sisäinen integroitu digitaalinen alhaisen pääsyn suodatin, jota voidaan käyttää vähentämään korkeataajuista kohinaa asettamalla sen rajataajuus.Erityisesti voimme asettaa digitaalisen suodattimen rajataajuuden modifioimalla MPU-6050: n konfigurointi A/D-näytteenoton aiheuttaman korkeataajuisen kohinan poistamiseksi.
MPU-6050-pohjainen liikkeen etenemissuuntainen laskenta
MPU-6050 on kuuden akselin kiihtyvyysanturi ja gyroskooppianturi, jota voidaan käyttää objektien liikkeen ja asenteen mittaamiseen.MPU-6050: een perustuva liikesuuntien laskenta voidaan toteuttaa seuraavilla vaiheilla:
Ensimmäinen askel on lukea anturitiedot.Meidän on luettava MPU-6050-anturien kiihtyvyysanturi- ja gyroskooppitiedot sopivien ohjaimien ja kirjastotoimintojen avulla.Nämä tiedot tulostetaan yleensä digitaalisessa muodossa, joten tarvitaan jonkin verran muuntamista ja kalibrointityötä niiden muuntamiseksi fyysisten yksiköiden todellisiksi mittauksiin.
Toinen vaihe on laskea kiihtyvyys.Ensinnäkin meidän on käsiteltävä tietoja kiihtyvyysmittarista objektin kiihtyvyyden saamiseksi kussakin akselissa.Myöhemmin objektin nopeuden ja siirtymisen laskemiseksi jokaisella akselilla meidän on integroitava kiihtyvyystiedot.Tässä prosessissa käytetään usein numeerisia integraatiotekniikoita, kuten Eulerin menetelmää tai Lunger-Kutta-menetelmää, siirtymälaskelmien tarkkuuden varmistamiseksi.
Kolmas vaihe on laskea kulmanopeus.Käyttämällä gyroskooppitietoja, objektin kulmanopeus kussakin akselissa voidaan laskea.Nämä tiedot on jälleen kalibroitava ja muunnettava kulmanopeuden saamiseksi todellisissa fyysisissä yksiköissä.
Neljäs vaihe on pyörimisen laskeminen.Integroimalla kulmanopeustiedot voidaan laskea objektin kiertokulma kussakin akselissa.Tämä voidaan tehdä käyttämällä numeerisia integraatiotekniikoita, kuten Eulerin menetelmää tai Longe-Kutta-menetelmää kulman laskemiseksi.
Viides askel on yhdistää tiedot.Yhdistämme kiihtyvyysmittarien ja gyroskoopien tiedot objektin täydellisten asenne- ja sijaintitietojen saamiseksi.Tämä voidaan tehdä käyttämällä algoritmeja, kuten kvaternionipohjaista asenneratkaisua tai Euler-kulmanratkaisijaa.
Kuudes vaihe on tulosten visualisointi.Muunnamme lasketun objektin liikkeen etenemissuunnan 3D -koordinaattijärjestelmän pistejoukkoksi ja näytämme sen käyttämällä sopivia visualisointityökaluja intuitiivisempaan ymmärtämiseen objektin liikkeen etenemissuunnasta ja asenteen muutoksista.
Usein kysyttyjä kysymyksiä [UKK]
1. Kuinka tarkka on MPU6050?
Hankitut tulokset osoittivat riittävän tarkkuuden alle 1 %: n ja luotettavuuden varmistaen hissin akselin ja hissiteollisuuden korkeiden standardien asianmukaisen mittauksen.
2. Kuinka lukea tietoja MPU6050: stä?
Lukeaksesi sisäiset MPU6050 -rekisterit, isäntä lähettää aloitusedellytyksen, jota seuraa I2C -orjaosoite ja kirjoitusbitti ja sitten luettava rekisteriosoite.
3. Missä MPU6050 käytetään?
Kukkulaitteiden puettavissa terveydenhuollon seurannassa.Droneissa ja kvadkoptereissa MPU6050: tä käytetään asennon hallintaan.Käytetään robottivarren hallinnassa.Käsien eleiden hallintalaitteet.
4. Onko MPU6050 IMU?
MPU6050 IMU -anturilohko lukee laitteistoon kytkettyjen MPU-6050-anturin tietoja.Lohko tuottaa kiihtyvyyden, kulmanopeuden ja lämpötilan anturin akseleita pitkin.
5. Mikä on MPU6050: n käsittely?
Tämä on MPU6050: n aluksella oleva prosessori, joka yhdistää kiihtyvyysmittarista ja gyroskoopista tulevat tiedot.DMP on avain MPU6050: n käyttämiseen ja selitetään yksityiskohtaisesti myöhemmin.Kuten kaikkien mikroprosessorien kohdalla, DMP tarvitsee laiteohjelmiston suorittaakseen.
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.

Perusteellinen opas LM317: lle: Säädettävien jännitesäätimien ymmärtäminen
03.09.2024
TL431: n ymmärtäminen: Kattava opas tarkkuustutkimuksiin
03.09.2024
Suositut viestit
-
Mikä on GND piirissä?
01.01.1970 3108
-

RJ-45 Connector Guide: RJ-45 -liitin värikoodit, kytkentäjärjestelmät, R-J45-sovellukset, RJ-45
01.01.1970 2672
-
Virtalähteen jännitteiden ymmärtäminen Electronics VCC: ssä, VDD: ssä, VEE: ssä, VSS: ssä ja GND: ssä
15.11.0400 2211
-

Kuituliitintyypit: SC vs LC ja LC vs MTP
01.01.1970 2182
-

Vertailu DB9: n ja RS232: n välillä
01.01.1970 1802
-

Mikä on LR44 -akku?
Sähkö, joka kaikkialla läsnä oleva voima, läpäisee hiljaa jokapäiväisen elämämme kaikki osat, triviaalisista välineistä hengenvaarallisiin lääketieteellisiin laitteisiin, sillä on hiljainen rooli.Tämän energian todella tarttuminen, etenkin sen tallentaminen ja tehokkaasti tuottaminen, ei kuitenkaan ole helppoa.Tätä taustaa vasten tämä artikkeli keskittyy tyyppiseen kolikkikenn...01.01.1970 1774
-
Perusteiden ymmärtäminen: induktanssiresistenssi ja kappaus
Sähkötekniikan monimutkaisessa tanssissa peruselementtien kolmikko on keskipiste: induktanssi, vastus ja kapasitanssi.Jokaisella on ainutlaatuiset piirteet, jotka määräävät elektronisten piirejen dynaamiset rytmit.Täällä aloitamme matkan näiden komponenttien monimutkaisuuden purkamiseksi, paljastamaan niiden erilliset roolit ja käytännölliset käytöt laajassa sähköorkesterissa.Ind...01.01.1970 1728
-

CR2430 Akun kattava opas: Tekniset tiedot, sovellukset ja vertailu CR2032 -akkuihin
Mikä on CR2430 -akku?CR2430 -paristojen edutNormiCR2430 -akkosovelluksetCR2430 EquivalentCR2430 vs CR2032Akku CR2430 -kokoMitä etsiä ostaessasi CR2430 ja vastaaviaTietolomake PDFUsein kysyttyjä kysymyksiä Paristot ovat pienten elektronisten laitteiden sydän.Monien käytettävissä olevien tyyppien joukossa kolikkosoluilla on ratkaiseva rooli, jota yleisesti löytyy laskimissa, kaukosäätimi...01.01.1970 1674
-
Mikä on RF ja miksi käytämme sitä?
Radiotaajuus (RF) -tekniikka on keskeinen osa modernin langattoman viestinnän, mikä mahdollistaa tiedonsiirron pitkillä etäisyyksillä ilman fyysisiä yhteyksiä.Tämä artikkeli perustuu RF: n perusteisiin selittäen, kuinka sähkömagneettinen säteily (EMR) mahdollistaa RF -viestintä.Tutkimme EMR: n periaatteita, RF-signaalien luomista ja hallintaa sekä niiden laajaa käyttöä.Artikkeli ...01.01.1970 1670
-
Kattava opas HFE: lle transistoreissa
Transistorit ovat tärkeitä komponentteja nykyaikaisissa elektronisissa laitteissa, mikä mahdollistaa signaalin monistumisen ja ohjauksen.Tämä artikkeli pohtii HFE: tä ympäröivää tietoa, mukaan lukien kuinka valita transistorin HFE -arvo, HFE: n löytäminen ja erityyppisten transistorien hyöty.Tutkimalla HFE: tä, saamme syvemmän käsityksen transistorien toiminnasta ja niiden roolista...15.11.5600 1632
Kuuma osanumero
-

GRM0225C1ER60WDAEL
Murata Electronics
CAP CER 0.6PF 25V C0G/NP0 01005
ZXTN2011ZTA
Diodes Incorporated
TRANS NPN 100V 4.5A SOT89-3
GRM1555C1E8R5CA01D
Murata Electronics
CAP CER 8.5PF 25V C0G/NP0 0402
TLV5617ACD
Texas Instruments
IC DAC 10BIT V-OUT 8SOIC
NFA31CC220S1E4D
Murata Electronics
CAP ARRAY 22PF 25V 1206
HK06033N9S-T
Taiyo Yuden
FIXED IND 3.9NH 300MA 270MOHM SM
HSMS-281B-TR1G
Broadcom Limited
RF DIODE SCHOTTKY 20V SOT323
CC0603JRNPO9BN101
YAGEO
CAP CER 100PF 50V C0G/NPO 0603
GRJ21BR71H104KE01L
Murata Electronics
CAP CER 0.1UF 50V X7R 0805
MI-J22-MZ
Vicor Corporation
DC DC CONVERTER 15V 25W
MAX5250AEAP+T
Analog Devices Inc./Maxim Integrated
IC DAC 10BIT V-OUT 20SSOP
NRVB230LSFT1G
onsemi
DIODE SCHOTTKY 30V 2A SOD123FL
BD5342FVE-TR
Rohm Semiconductor
IC SUPERVISOR 1 CHANNEL 5VSOF
UMK316B7154KF-T
Taiyo Yuden
CAP CER 0.15UF 50V X7R 1206
EPM7512AEQI208-10
Intel
IC CPLD 512MC 10NS 208QFP
TLN6158M010R0055
KYOCERA AVX
CAP TANT 1500UF 20% 10V 6030
DS1805Z-010+T&R
Analog Devices Inc./Maxim Integrated
IC DGTL POT 10K 16SOIC
NCV1117ST12T3G
onsemi
IC REG LINEAR 12V 1A SOT223 -
IRS2334MTRPBF
Infineon Technologies
IC GATE DRVR HALF-BRIDGE 28MLPQ
74LCX540WM
onsemi
IC BUFFER INVERT 3.6V 20SOIC
LE75282BBVC
Microchip Technology
IC TELECOM INTERFACE 44TQFP
CD45-E2GA222M-NKA
TDK Corporation
CAP CER 2200PF 440VAC RADIAL
ADP50250017CBZR
Analog Devices Inc.
IC REG LINEAR
SMV1212-001LF
Skyworks Solutions Inc.
DIODE VARACTOR 12V 20MA SOT23
TL3843BD
Texas Instruments
IC REG CTRLR MULT TOP 14SOIC
MCF52223CAF66
Freescale Semiconductor
MCF5222X 32-bit MCU, ColdFire V2
08053D475KAT2A
KYOCERA AVX
CAP CER 4.7UF 25V X5R 0805
LTC3892EUH-2#TRPBF
Analog Devices Inc.
IC REG CTRLR BUCK 32QFN
GBU1508
HY Electronic (Cayman) Limited
GLASS PASSIVATED BRIDGE RECTIFIE
TPS79433DGNR
Texas Instruments
IC REG LIN 3.3V 250MA 8MSOP PWR
ADV7179KCP-REEL
Analog Devices Inc.
IC ENCODER VID NTSC/PAL 40LFCSP
STL56N3LLH5
STMicroelectronics
MOSFET N-CH 30V 56A POWERFLAT
VI-B72-CW
Vicor Corporation
DC DC CONVERTER 15V 100W
BALF-NRG-01D3
STMicroelectronics
BALUN 2.4GHZ-2.5GHZ 50/50 4WFBGA
ADN8835ACPZ-R7
Analog Devices Inc.
IC THERMO COOLER DRIVER 36LFCSP
170M6608
Eaton - Bussmann Electrical Division
FUSE SQUARE 500A 700VAC RECT -
TMC4361A-LA
Trinamic Motion Control GmbH
IC MOTOR DRIVER 3.3V/5V 40QFN
NX5P2553GVH
NXP USA Inc.
IC PWR SWITCH N-CHAN 1:1 6TSOP
LT3085EMS8E#TRPBF
Analog Devices Inc.
IC REG LIN POS ADJ 500MA 8MSOP
MX66L51235FMI-10G
Macronix
IC FLASH 512MBIT SPI 16SOP
TLV2211CDBVRG4
Texas Instruments
IC OPAMP GP 65KHZ RRO SOT23-5
VN5025AJTR-E
STMicroelectronics
IC PWR DRVR N-CHAN 1:1 PWRSSO12
VE-272-IY
Vicor Corporation
DC DC CONVERTER 15V 50W
AT25SF081B-SSHD-T
Adesto Technologies
IC FLASH 8MBIT SPI/QUAD 8SOIC
TPS3513N
Texas Instruments
IC SUPERVISOR 3 CHANNEL 14DIP
XR16L2550IL-F
MaxLinear, Inc.
IC UART FIFO 16B DUAL 32QFN
08055C823KAJ2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 0805
MPC8245LZU333D
Freescale Semiconductor
RISC MICROPROCESSOR, 32 BIT, PO
VI-2N2-MU
Vicor Corporation
DC DC CONVERTER 15V 200W
MB9AF132KBPMC-G-SNE2
Cypress Semiconductor Corp
IC MCU 32BIT 128KB FLASH 48LQFP
AT17F080-30JU
Microchip Technology
IC FLASH CONFIG 8M 20PLCC
VI-JNF-EZ
Vicor Corporation
DC DC CONVERTER 72V 25W
MT89L86AP1
Microchip Technology
IC TELECOM INTERFACE 44PLCC
LT6200CS8-5#TRPBF
Analog Devices Inc.
IC BUFFER 1 CIRCUIT 8SO