L298N Motor -ohjaimet: Ominaisuudet, piirikaaviot ja sovellukset
Luettelo
Johdanto L298N: ään
L298N on L298: n pystysuora pakettiversio.Se on kaksikanava täysisiltaan moottorin ohjaimen siru, joka voi hyväksyä korkean jännitteen ja suuren virran.Sen työjännite voi saavuttaa 46 V: n ja sen enimmäislähtövirta on 4a.Lisäksi L298N: llä on myös kaksi mahdollisen ohjausliittimen.Nämä ohjausliittimet mahdollistavat piirin työtilan säätämisen dynaamisesti kytkemällä ja irrottamalla sisäänpistoke pistorasian hyppääjällä ilman tulosignaalia.L298N on varustettu logiikan tehonsyötöllä, jonka avulla sisäinen logiikkapiirin osa voi toimia alhaisella jännitteellä.Samanaikaisesti se voi myös tulostaa 5 V: n logiikkajännitteen ulkoisesti.Jännitteisen stabiloivan sirun vaurioiden välttämiseksi, kun käytetään yli 12 V: n ajojännitettä, on erittäin suositeltavaa käyttää ulkoista 5 V: n käyttöliittymää riippumattomaan virtalähteeseen.
L298N hallitsee pääohjauspiirin I/O -syöttöliittoa ja säätää lähtöjännitteen suoraan virtalähteen läpi moottorin eteenpäin suuntautuvan, kääntämisen ja pysäyttämisen toteuttamiseksi.Normaalisti L298N voi ajaa suoraan releitä (nelisuuntaista), solenoideja, solenoidiventtiilejä, kaksi tasavirtamoottoria ja yhden askelmoottorin (kaksivaiheinen tai neljävaiheinen).
Vaihtoehdot ja vastaavat:
• E-L298N
Olla L298HN
Olla Max14870etc+t
• LM18298T
L298N: n toiminnalliset piirteet
Logiikan tulon yhteensopivuus: L298N: n logiikkatulo on yhteensopiva TTL: n, CMOS: n ja muiden logiikan tasojen kanssa.
Ylikuumentava suoja: L298N: llä on ylikuumenemisfunktio.Kun sirun lämpötila on liian korkea, se katkaisee ulostulon automaattisesti.
Sisäänrakennetun ilmaisen polaarisuusidiodin: L298N: llä on sisäänrakennettu ilmainen napaisuus diodi, jota voidaan käyttää tasavirtamoottorien jarruttamiseen.
Suuri virran lähtö: L298N voi tarjota suuren lähtövirran ja sopii joillekin sovelluksille, jotka vaativat suurta ajovirtaa.
Kaksinkertainen H-siltarakenne: L298N integroi kaksinkertaisen H-siltarakenteen, joka voi hallita kahden tasavirtamoottorin tai askelmoottorin ohjausta ja nopeutta.
L298N -piirikaavio
L298N: n piirikaavio on seuraava:
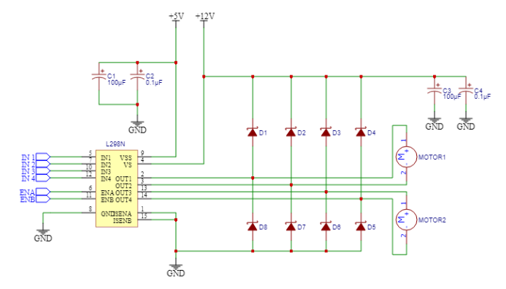
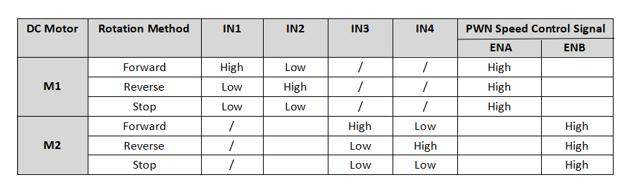
OUT1, OUT2 ja OUT3, OUT4 on kytketty moottorille1, moottori2;IN1, IN2, IN3, 4 -nastat mikrokontrollerista ohjaustason pääsyyn, moottorin eteenpäin suuntautumiseen ja taaksepäin;ENA, ENB, joka on kytketty Enable -liittimen ohjaukseen, moottorin nopeuden hallitsemiseksi.L298N: n ohjauslogiikan suhdekaavio on seuraava:
Moottorin nopeuden säätelyn suhteen olemme ottaneet käyttöön PWM -nopeuden säätelymenetelmän.Periaate on nopeuden säätelyn toteuttamisessa hallitsemalla kytkentäputken johtamisaikaa T yhdessä jaksossa.Keskimääräinen jännite u moottorin läpi täydellisen syklin T aikana voidaan ilmaista U = VCC × (T/T) = A × VCC.Missä, a = t/t, kutsutaan työsykliksi ja VCC edustaa syöttöjännitettä.Moottorin nopeus on verrannollinen moottorin läpi kulkevaan jännitteeseen, kun taas moottorin välinen jännite on verrannollinen ohjausaaltomuodon käyttöjaksoon.Siksi moottorin nopeuden ja käyttöjakson nopeuden välillä on suhteellinen suhde: mitä suurempi työsykli, sitä nopeampi moottorin nopeus.
L298N: n ohjausmenetelmä
Kun käytetään L298N: ää, meidän on syötettävä ohjaussignaalit IN1: lle, IN2: lle, IN3: lle ja IN4: lle moottorin eteenpäin suuntautuvan ja käänteisen pyörimisen ja nopeuden ohjaamiseksi.Tässä on useita ohjausmenetelmiä:
PWM -ohjaustila
PWM -tila voi tehokkaasti hallita moottorin nopeutta.Kun käytät PWM -tilaa, meidän on käytettävä kahta nasta EN1 ja EN2 moottorin nopeuden säätämiseksi.Erityisesti, kun EN1- ja EN2 -nastat ovat korkealla tasolla, moottori toimii normaalisti;Kun ne ovat alhaisella tasolla, moottori lakkaa pyörivän.
Yksisuuntainen ohjaustila
Kun IN1, IN2, IN3 ja 4 ovat korkeatasoisia samanaikaisesti, moottori pyörii eteenpäin;Kun kaikki kaksi syöttöporttia ovat korkeatasoisia ja kaksi muuta tuloporttia ovat matala, moottori pyörii päinvastaisesti.
Kaksisuuntainen ohjaustila
Kun käytetään kaksisuuntaista ohjaustilaa, IN1 ja IN2 ovat vastuussa moottorin 1 ohjaamisesta, kun taas IN3 ja 4 ovat vastuussa moottorin 2 ohjaamisesta. Erityisesti, kun IN1 on korkea ja IN2 on matala, moottori 1 pyörii eteenpäin;Sitä vastoin, kun IN1 on matala ja IN2 on korkea taso, moottori 1 pyörii päinvastaisesti.Samoin IN3: n ja 4: n ohjauslogiikka on myös sovellettavissa moottorin 2 eteenpäin ja käänteiseen kiertoohjaukseen.
Pin -kaavio ja L298N: n toiminnot
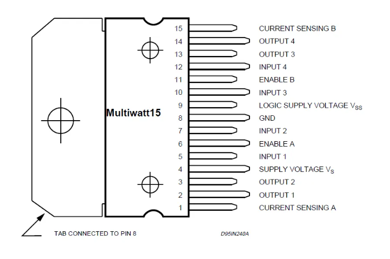
Virta
VS: Syöttöjännitetulo (enintään 46 V)
GND: Maatappi
Logiikan hallintatappi
IN1, IN2: Käytetään moottorin 1 pyörimissuunnan ohjaamiseen
IN3, IN4: Käytetään moottorin 2 pyörimissuunnan ohjaamiseen
Moottorin ohjaustappi:
OUT1, OUT2: Käytetään moottorin 1 suunnan ohjaamiseen
OUT3, OUT4: Käytetään moottorin 2 suunnan hallintaan
ENA: Enable -nasta, jota käytetään moottorin 1 nopeuden hallintaan
ENB: ENABLE PIN -PIN, jota käytetään moottorin 2 nopeuden hallintaan
Kuinka käyttää L298N?
Kytke virtalähde: L298N -ohjainmoduulin virtalähde tulisi pitää alueella 12 V - 35 V.Käytännöllisissä sovelluksissa virtalähteen vakauden varmistamiseksi meidän on ehkä myös suodatettava virtalähde.
Kytke moottorit: Yhdistämme kaksi moottoria L298N: n lähtötappiin ohjaimen läpi, ja ohjaustaso syötetään suoraan moottoriin L298N: n läpi.
Ohjaus L298N: Käytämme ohjausporttia (Enable, ohjaustappi) L298N: n ohjaamiseen.Meidän on asetettava Enable -portti- ja ohjaustapin tila arvojen määrittämisessä.Nämä tilat määrittävät L298N -lähdön tasotilan.Vaihtamalla näitä tiloja voimme tehokkaasti hallita moottorin eteenpäin suuntautuvaa ja käänteistä kiertoa ja nopeutta.
Kuinka käyttää PWM: ää moottorin nopeuden säätelemiseen?
Jos haluamme käyttää PWM: ää moottorin nopeuden säätelemiseen, meillä on kaksi johdotusmenetelmää:
Johdotusmenetelmä yksi (suositeltu):
Poistamme hyppykorkin kanavan Enable ja 5 V: n välillä, kytkemme Enable -nasta Arduinon PWM -nastaan ja kytket nastat 1 ja 2 Arduinon kahteen normaaliin nastaan.Tällä tavalla voimme hallita kanavan kytkintä PWM -tapin läpi moottorin nopeuden säätämiseksi;Hallitsemalla nastat 1 ja 2 tason tilaa, voimme ohjata moottorin pyörimissuuntaa.Tämä johdotustapa vaatii vain yhden PWM -nastan käytön kanavaa kohden, mutta vie kaksi normaalia nastaa.Siksi käytännöllisissä sovelluksissa meidän on punnittava ja valittava useista johdotusmenetelmistä Arduinossa käytettävissä olevien tapien lukumäärän perusteella.
Johdotusmenetelmä kaksi (ei suositella):
Emme poista hyppääjää Channel Enable ja 5 V: n välillä, joten kanava pysyy jatkuvasti auki.Sitten yhdistettiin nastat 1 ja 2 vastaavasti Arduinon kahteen PWM -rajapintaan.Hallitsemalla näitä kahta nastaa vastaavia lähtöjä voimme ohjata moottorin pyörimissuuntaa ja nopeutta.On selvää, että tämä johdotusmenetelmä vie enemmän PWM -nastat, koska jokainen kanava vaatii kaksi PWM -nastata hallitsemaan.Tämä menetelmä ei kuitenkaan vie mitään yleisiä nastaa.Siksi emme suosittele tämän johdotusjärjestelmän käyttöä, kun PWM -PIN -resurssit ovat tiukkoja.
Missä L298N: ää käytetään?
Sähköajoneuvot: L298N: ää voidaan käyttää sähköajoneuvojen käyttömoottorien, kuten sähköpolkupyörien, skootterien jne. Ohjaamiseen, esimerkiksi polkupyörien, hallitsemalla moottorin kierto -nopeutta ja suuntaa, L298N voi saavuttaa kiihtyvyyden, hidastumisen ja hidastumisen jaSähköpolkupyörien vakaa ajo.Ratsastaja voi siirtää ohjeita L298N: lle käyttämällä kahvaa tai painikkeita, säätäen siten moottorin lähtöä polkupyörän aseman tekemiseksi ratsastajan toiveiden mukaan.
Automatisoidut teollisuuslaitteet: Teollisuusautomaation alalla L298N: ää voidaan käyttää erilaisten teollisuuslaitteiden, kuten kuljetinhihnojen, robottivarsien, teollisuusrobotien jne. Moottorien hallintaan, esimerkiksi robottivarsiin, L298N hallitsee tarkasti tarkastiMoottorin pyörimiskulma ja nopeus, jolloin robottivarsi voi liikkua ennalta määrätyn suuntauksen mukaan ja saavuttaa korkean tarkan toiminnan.Tämä ei vain paranna tuotannon tehokkuutta, vaan myös vähentää toimintavirheiden aiheuttamia tuotantohäviöitä.
Robottitekniikka: L298N: ää käytetään usein robottiprojekteissa ohjaamaan moottoria Robotin liikkeen ja toiminnan toteuttamiseksi.Teollisuusrobotien on usein suoritettava raskas kuormitus, tarkkaa työpaikkaa, ja niiden on oltava erittäin korkeat vaatimukset käyttömoottoreissa.L298N tarjoaa tehokkaan voimantuen teollisuusroboteille erinomaisella ajokyvyllä ja vakavuudellaan.Olipa kyse käsittelystä, kokoonpanosta tai tarkastamisesta, L298N voi varmistaa, että teollisuusrobotit suorittavat tehtävät tarkasti ja tehokkaasti.
Älykäs koti: Älykkäissä kotijärjestelmissä L298N: ää voidaan käyttää kaihtimien, verhojen, ovien ja muiden laitteiden moottorien hallintaan automatisoidun hallinnan saavuttamiseksi.Yhdistämällä antureihin kodinlaitteet voidaan säätää automaattisesti valaistuksen, lämpötilan ja muiden olosuhteiden mukaan.
Auringonseurantajärjestelmä: Aurinkojärjestelmissä L298N: ää voidaan käyttää aurinkopaneelien kallistuskulman hallintaan aurinkoenergian seurantajärjestelmän toteuttamiseksi.L298N: n hallinnan avulla aurinkoenergian seurantajärjestelmä voi havaita auringon sijainnin muuttumisen reaaliajassa ja säätää aurinkopaneelien kallistuskulmaa vastaavasti.Tämä dynaaminen säätöprosessi varmistaa, että aurinkopaneelit ylläpitävät aina optimaalisen kulman aurinkoon, mikä parantaa siten aurinkopaneelien energiankeräystehokkuutta.
Usein kysyttyjä kysymyksiä [UKK]
1. Voiko L298N -ohjausnopeus?
L298N on kaksois-H-silta-moottorin ohjain, joka mahdollistaa kahden tasavirtamoottorin nopeuden ja suunnanhallinnan samanaikaisesti.
2. Miksi L298N ei toimi?
Sen on oltava yli 4,5 V L298: n oikean käytön kannalta.2. Menetät ehkä 2,5 V L298: n yli.Ehkä moottorin ajamiseen ei ole jäljellä tarpeeksi jännitettä.
3. Mikä on L298N?
L298N-moottorin ohjain on ohjain, joka käyttää H-Bridgeä moottorien suunnan ja PWM: n helposti nopeuden hallitsemiseksi.Tämän moduulin avulla voit itsenäisesti hallita kahta jopa 2A -moottoria, joista kukin molemmissa suunnissa.Tarjonta -alue voi vaihdella välillä 5 V - 35 V, riittävä useimpiin DC -moottoriprojekteihin.
4. Voimmeko yhdistää 4 moottoria L298N: ään?
Vastaus on kyllä ja ei. Se riippuu siitä, kuinka käytät L298N -moottorin ohjainta.L298N on alun perin suunniteltu kahden tasavirtamoottorin tai yhden askelmoottorin ohjaamiseen.Mutta jos et halua, että jokainen moottori pyörii taaksepäin, voit käyttää L298N -ohjaimen molemmilla puolilla kahden tasavirtamoottorin ja yhteensä 4 moottorin hallitsemiseksi.
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.

STWD100NYWY3F -tekniset tiedot ja toimintaominaisuudet, sovellusesimerkkejä mikroprosessorijärjestelmissä
29.08.2024

IR2104 Kattava opas: Korkean suorituskyvyn puolisilta -ohjaimet
29.08.2024
Suositut viestit
-
Mikä on GND piirissä?
01.01.1970 2959
-

RJ-45 Connector Guide: RJ-45 -liitin värikoodit, kytkentäjärjestelmät, R-J45-sovellukset, RJ-45
01.01.1970 2513
-

Kuituliitintyypit: SC vs LC ja LC vs MTP
01.01.1970 2100
-
Virtalähteen jännitteiden ymmärtäminen Electronics VCC: ssä, VDD: ssä, VEE: ssä, VSS: ssä ja GND: ssä
10.11.0400 1915
-

Vertailu DB9: n ja RS232: n välillä
01.01.1970 1768
-

Mikä on LR44 -akku?
Sähkö, joka kaikkialla läsnä oleva voima, läpäisee hiljaa jokapäiväisen elämämme kaikki osat, triviaalisista välineistä hengenvaarallisiin lääketieteellisiin laitteisiin, sillä on hiljainen rooli.Tämän energian todella tarttuminen, etenkin sen tallentaminen ja tehokkaasti tuottaminen, ei kuitenkaan ole helppoa.Tätä taustaa vasten tämä artikkeli keskittyy tyyppiseen kolikkikenn...01.01.1970 1717
-
Perusteiden ymmärtäminen: induktanssiresistenssi ja kappaus
Sähkötekniikan monimutkaisessa tanssissa peruselementtien kolmikko on keskipiste: induktanssi, vastus ja kapasitanssi.Jokaisella on ainutlaatuiset piirteet, jotka määräävät elektronisten piirejen dynaamiset rytmit.Täällä aloitamme matkan näiden komponenttien monimutkaisuuden purkamiseksi, paljastamaan niiden erilliset roolit ja käytännölliset käytöt laajassa sähköorkesterissa.Ind...01.01.1970 1667
-

CR2430 Akun kattava opas: Tekniset tiedot, sovellukset ja vertailu CR2032 -akkuihin
Mikä on CR2430 -akku?CR2430 -paristojen edutNormiCR2430 -akkosovelluksetCR2430 EquivalentCR2430 vs CR2032Akku CR2430 -kokoMitä etsiä ostaessasi CR2430 ja vastaaviaTietolomake PDFUsein kysyttyjä kysymyksiä Paristot ovat pienten elektronisten laitteiden sydän.Monien käytettävissä olevien tyyppien joukossa kolikkosoluilla on ratkaiseva rooli, jota yleisesti löytyy laskimissa, kaukosäätimi...01.01.1970 1584
-
Mikä on RF ja miksi käytämme sitä?
Radiotaajuus (RF) -tekniikka on keskeinen osa modernin langattoman viestinnän, mikä mahdollistaa tiedonsiirron pitkillä etäisyyksillä ilman fyysisiä yhteyksiä.Tämä artikkeli perustuu RF: n perusteisiin selittäen, kuinka sähkömagneettinen säteily (EMR) mahdollistaa RF -viestintä.Tutkimme EMR: n periaatteita, RF-signaalien luomista ja hallintaa sekä niiden laajaa käyttöä.Artikkeli ...01.01.1970 1558
-

CR2450 vs CR2032: Voidaanko sen sijaan käyttää akkua?
Litium -mangaaniparistoilla on joitain samankaltaisuuksia muiden litiumparistojen kanssa.Korkean energian tiheys ja pitkä käyttöikä ovat ominaisuuksia, joita heillä on yhteisiä.Tällainen akku on voittanut monien kuluttajien luottamuksen ja suosion ainutlaatuisen turvallisuuden vuoksi.Kalliit tekniset vempaimet?Pienet laitteet koteissamme?Katso ympärillesi ja näet ne kaikkialla.Näistä mo...01.01.1970 1523
Kuuma osanumero
-

SP491EEP-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 14DIP
LT1952EGN-1#PBF
Analog Devices Inc.
IC REG CTRLR FWRD CONV 16SSOP
SN74CBT3383DGVR
Texas Instruments
IC BUS FET EXCH SW 5X2:2 24TVSOP
FSB50250UD
onsemi
MOD SPM 500V 1.1A SPM23-HD
5.0SMDJ70CA
Littelfuse Inc.
TVS DIODE 70VWM 113VC DO214AB
BAT54-HE3-08
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 30V 200MA SOT23-3
FDS8934A
onsemi
MOSFET 2P-CH 20V 4A 8SOIC
VE-243-EW
Vicor Corporation
DC DC CONVERTER 24V 100W
MT29F1G08ABAEAH4:E
Micron Technology Inc.
IC FLASH 1GBIT PARALLEL 63VFBGA
100324QC
Fairchild Semiconductor
IC TRANSLATOR UNIDIR 28PLCC
UC2525BN
Texas Instruments
IC REG CTRLR MULT TOPOLOGY 16DIP
SN74LS109AN
Texas Instruments
IC FF JK TYPE DUAL 1BIT 16DIP
TPS3307-25D
Texas Instruments
IC SUPERVISOR 3 CHANNEL 8SOIC
F1892CCD1600
Sensata-Crydom
DIODE MODULE 1.6KV 90A
PKB4418PIOANB
Flex Power Modules
DC DC CONVERTER 1.5V 45W
MC74VHCT132ADTRG
onsemi
IC GATE NAND SCHMITT 4CH 14TSSOP
SZESD9101P2T5G
onsemi
TVS DIODE 5VWM 7VC SOD923
PIC16LF1936T-I/SS
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SSOP -

APT17F120J
Microchip Technology
MOSFET N-CH 1200V 18A ISOTOP
T495X477K010ATE100
KEMET
CAP TANT 470UF 10% 10V 2917
SMBJ12CA
Taiwan Semiconductor Corporation
TVS DIODE 12VWM 19.9VC DO214AA
ADG419BRMZ-REEL7
Analog Devices Inc.
IC SWITCH SPDT X 1 35OHM 8MSOP
18085C473JAT2A
KYOCERA AVX
CAP CER 0.047UF 50V X7R 1808
593D107X9010D2TE3
Vishay Sprague
CAP TANT 100UF 10% 10V 2917
S-80958CNMC-G9UT2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
SN74LV4053ANSR
Texas Instruments
IC SWITCH SPDT X 3 75OHM 16SO
RD6.2MW-T1B-AT
Renesas
RD6.2MW-T1B-AT - ZENER DIODES 20
C2012X7R1E105K125AB
TDK Corporation
CAP CER 1UF 25V X7R 0805
SN74HC4060PWR
Texas Instruments
IC BINARY COUNTER 14BIT 16TSSOP
R2A30428BM#W0
Renesas Electronics America Inc
MOTION CONTROL ELECTRONIC
DF2B7SL,L3F
Toshiba Semiconductor and Storage
TVS DIODE 5.3VWM 16VC SL2
AS6C4016A-45BIN
Alliance Memory, Inc.
IC SRAM 4MBIT PARALLEL 48VFBGA
LM1084IS-5.0
Texas Instruments
IC REG LIN FIXED POS LDO REG 5V
RT0805DRE0715RL
YAGEO
RES SMD 15 OHM 0.5% 1/8W 0805
TPA6011A4PWPR
Texas Instruments
IC AMP CLASS AB STER 3W 24HTSSOP
PALR-08VF
JST Sales America Inc.
CONN PLUG HSG 8POS 2.00MM -

NDS6S2405C
Murata Power Solutions Inc.
DC DC CONVERTER 5V 6W
HCPL-0710
Broadcom Limited
OPTOISO 3.75KV PUSH PULL 8SO
ADS4122IRGZR
Texas Instruments
IC ADC 12BIT PIPELINED 48VQFN
FAR-D6JH-2G1325-B1YZ-Z
Taiyo Yuden
RF DUPLEXER 9SMD NO LEAD
TIP32C
onsemi
TRANS PNP 100V 3A TO220
NP50P06KDG-E1-AY
Renesas Electronics America Inc
MOSFET P-CH 60V 50A TO263
06031C562K4Z2A
KYOCERA AVX
CAP CER 5600PF 100V X7R 0603
OPA27GU/2K5
Texas Instruments
IC OPAMP GP 1 CIRCUIT 8SOIC
DAC900U
Burr Brown
IC DAC 10BIT A-OUT 28SOIC
LT1004CDR-2-5
Texas Instruments
IC VREF SHUNT 0.8% 8SOIC
NTB75N03L09T4
onsemi
MOSFET N-CH 30V 75A D2PAK
MBRF10100CT-JT
Diodes Incorporated
DIODE ARRAY 100V 5A ITO220AB
XC5VLX155T-2FFG1136C
AMD
IC FPGA 640 I/O 1136FCBGA
AT25640B-SSHL-T
Microchip Technology
IC EEPROM 64KBIT SPI 20MHZ 8SOIC
MAX14736EWL+T
Analog Devices Inc./Maxim Integrated
IC RF RECEIVER 9WLP
045202.5MRL
Littelfuse Inc.
FUSE BRD MNT 2.5A 125VAC/VDC SMD
IRLI520GPBF
Vishay Siliconix
MOSFET N-CH 100V 7.2A TO220-3
P1014NSE5DFA
NXP USA Inc.
IC MPU Q OR IQ 800MHZ 425TEBGA1