BNO055 Orientation -anturi: Arkkitehtuuri, Pinout ja Datarheet
Tässä artikkelissa tutkitaan BNO055 -anturia, merkittävää anturitekniikan kehitystä, joka integroi kiihtyvyysanturin, gyroskooppin ja magnetometrin toiminnallisuudet luotettavan absoluuttisen suuntautumistiedon tarjoamiseksi.BNO055 ei vain virtaviivaista suunnitteluprosessia eliminoimalla useiden anturien ja monimutkaisten kalibrointien tarve, vaan myös parantaa suorituskykyä sovelluksissa, kuten robotiikka ja virtuaalitodellisuus.Sen kyky yhdistää erilaisia aistituloja kattavaan suuntautumistietoon asettaa BNO055 huippuluokan ratkaisuna nopeasti kehittyvässä teknologisessa maailmassa.Luettelo

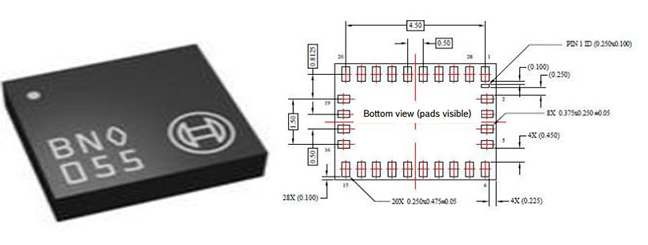
Mikä on BNO055?
Se BNO055 Esittelee kekseliäisyyttä yhdistämällä useita tunnistustekniikoita yhdeksi tehokkaaseen 9-akselin suunta-anturiin.Siinä on 14-bittinen kiihtyvyysanturi, 16-bittinen gyroskooppi, geomagneettinen anturi ja 32-bittinen käsivarren Cortex M0+ -mikrokontrolleri siistissä järjestelmässä pakkauksessa (SIP).Tämä kompakti järjestely yksinkertaistaa suunnittelusuunnitelmia ja tukee kekseliäisyyttä sovelluksissa, joissa tila on korvaamaton.Anturi saavuttaa tämän älykkään 28-nastaisen LGA-kokoonpanonsa kautta, mitat ovat 3,8 mm x 5,2 mm x 1,1 mm.Pienellä jalanjäljensä BNO055 mukautuu vaivattomasti avaruustietoisiin laitteisiin, mukaan lukien puettavat, droonit ja älypuhelimet.Hyväksymällä tällaisen tarkoituksenmukaisen kompaktiuden, se voi leikata tuotteen irtotavarana ja mittakaavan, joka on innokas nostamaan siirrettävyyttä ja käyttäjän tyytyväisyyttä.Sisäisesti BNO055 pystyy nopeaan datan fuusioon ja luotettaviin anturitietojen toimittamiseen.Sen sulautettu mikrokontrolleri hallitsee monimutkaisia laskelmia itsenäisesti, valaisemalla ensisijaisen järjestelmän prosessorin taakkaa, jolloin muiden välttämättömien tehtävien harjoittamisessa.Tämä riippumattomuus on suuri omaisuus sovelluksissa, jotka tarvitsevat nopeutettua tietojenkäsittelyä, varmistaen tasaisen ja välittömän suorituskyvyn.
BNO055 -nastakokoonpano
|
Ei |
Nimi |
I/O -tyyppi |
Kuvaus |
Funktio |
||
|
I2C |
Uart |
HID-I2C |
||||
|
1 |
PIN1 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
2 |
Hölynpöly |
Pohja |
Hölynpöly |
Hölynpöly |
||
|
3 |
VDD |
Toimittaa |
VDD |
VDD |
||
|
4 |
nboot_load_pin |
Digitaalisesti jhk |
Käynnistyslataustila Valitse PIN (Active Low) |
nboot_load_pin |
||
|
5 |
PS1 |
Digitaalisesti jhk |
Protokolla Valitse PIN 1 |
Gndio |
Vddio |
Gndio |
|
6 |
PS0 |
Digitaalisesti jhk |
Protokolla Valitse PIN 2 |
Gndio |
Gndio |
Vddio |
|
7 |
Pin7 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
8 |
PIN8 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
9 |
KORKKI |
- |
Ulkoinen kondensaattori |
KORKKI |
||
|
10 |
SOKEA |
Digitalistaa |
Käynnistyskuormaimen ilmaisin |
DNC |
||
|
11 |
nreset |
- |
Nollaa PIN (aktiivinen matala) |
nreset |
||
|
12 |
PIN12 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
13 |
PIN13 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
14 |
Int |
Digitalistaa |
Keskeyttää lähtö |
Keskeyttää |
||
|
15 |
PIN15 |
Pohja |
Yhdistä Gndioon |
Gndio |
||
|
16 |
PIN16 |
Pohja |
Yhdistä Gndioon |
Gndio |
||
|
17 |
Com3 |
Digitaalisesti jhk |
Digitaalinen käyttöliittymä PIN 3 |
I2C -osoite Valitse |
Gndio |
Gndio |
|
18 |
Com2 |
Digitaalinen I/O |
Digitaalinen käyttöliittymä PIN 2 |
Gndio |
||
|
19 |
Com1 |
Digitaalinen I/O |
Digitaalinen käyttöliittymä PIN 1 |
SCL |
Rx |
SCL |
|
20 |
Com0 |
Digitaalinen I/O |
Digitaalinen rajapinnan PIN 0 |
SDA |
TX |
SDA |
|
21 |
PIN21 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
22 |
PIN22 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
23 |
PIN23 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
24 |
PIN24 |
- |
Älä muodosta yhteyttä |
DNC |
||
|
25 |
Gndio |
Pohja |
Gndio |
Gndio |
||
|
26 |
Xout32 |
Digitalistaa |
Valinnainen OSC -portti |
OSC -lähtö |
||
|
27 |
Xin32 |
Digitaalisesti jhk |
Valinnainen OSC -portti |
OSC -tulo |
||
|
28 |
Vddio |
Toimittaa |
Vddio |
Vddio |
||
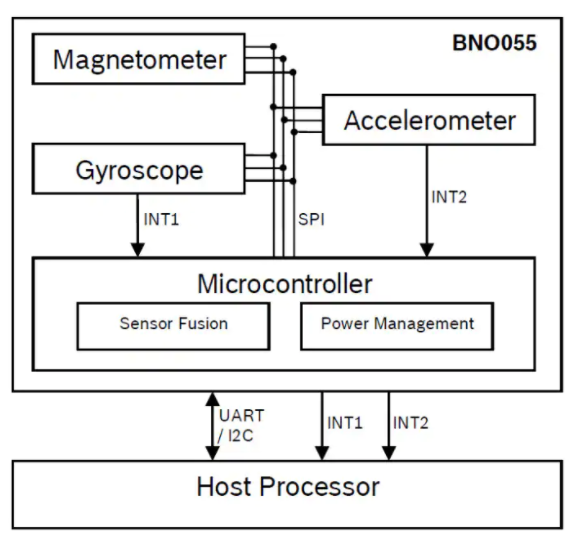
BNO055 Arkkitehtuurisuunnittelu
BNO055 Tekniset eritelmät
|
Tyyppi |
Parametri |
|
Tehtaan läpimenoaika |
18 viikkoa |
|
Paketti / kotelo |
28-Tflga-moduuli |
|
Nastat |
2 |
|
Pakkaus |
Nauha ja kela (TR) |
|
Osien tila |
Aktiivinen |
|
Päätteiden lukumäärä |
28 |
|
Terminaalimuoto |
Pusku |
|
Toimintojen lukumäärä |
1 |
|
Päätepiste |
0,5 mm |
|
Lähtötyyppi |
I2c, uart |
|
Syöttöjännite-min (VSUP) |
1,7 V |
|
Anturityyppi |
Kiihtyvyysanturi, gyroskooppi, magnetometri, 9 -akseli |
|
Leveys |
3,8 mm |
|
Lyijyvapaa |
Lyijyvapaa |
|
Asennustyyppi |
Pintakori |
|
Pintakori |
KYLLÄ |
|
Käyttölämpötila |
-40 ° C ~ 85 ° C TA |
|
Julkaistu |
2015 |
|
Kosteuden herkkyystaso (MSL) |
1 (rajoittamaton) |
|
Terminaalin sijainti |
Pohja |
|
Huippukäyttölämpötila (CEL) |
260 |
|
Toimitusjännite |
2,5 V |
|
Aika@Peak Reflow -lämpötila-max (t) |
Ei määritelty |
|
Syöttöjännite-Max (VSUP) |
3,6 V |
|
Analoginen IC - Muu tyyppi |
Analoginen piiri |
|
Korkeus (max) |
18 mm |
|
ROHS -tila
|
ROHS3 -yhteensopiva |
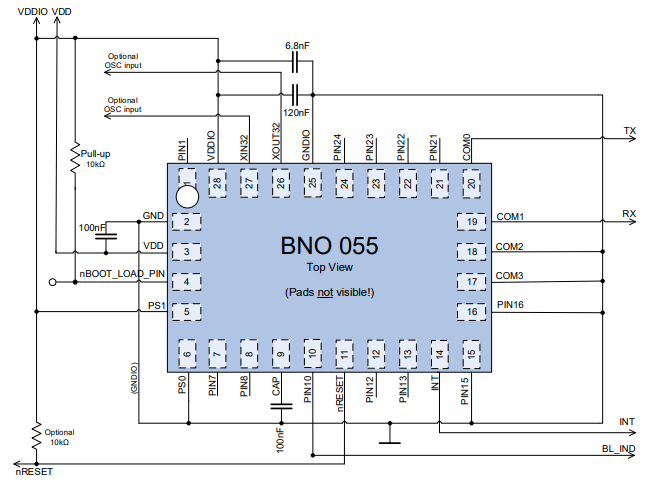
BNO055: n yhteyskaavio
BNO055: n ominaisuudet
Laaja suuntautumistiedot
BNO055 -anturi erotetaan sen kyvystä toimittaa laajoja suuntautumistietoja, jotka kattavat sekä kvaternionit että eulerikulmat.Tämä laitos on kanava tarkkaan liikkeen seurantaan ja hallintaan, mikä on erittäin merkityksellinen robotiikan, virtuaalitodellisuuden ja navigoinnin aloilla.Näiden kahden datamuodon välinen muutos vaatii rotaatioiden ja kulmamittausten asiantuntemusta, laajentamalla sovellusten spektriä, jossa tarkkuus priorisoidaan.
Edistyneiden anturitekniikoiden fuusio
BNO055: n edistyneiden anturien kokoonpano mittaa kiihtyvyyttä, pyörimisnopeutta ja geomagneettisia kenttiä.Tämä yhdistäminen parantaa anturitietojen fuusiota, jolloin saadaan tarkempia ja luotettavampia suuntautumislähtöjä.Anturin siru-fuusioalgoritmit helpottavat prosessointitarvikkeita, jotka yleensä liittyvät näihin tehtäviin, optimoimalla laskennallisen tehokkuuden ja pidentämällä akun käyttöikää.
Miniatyrisoitu muotoilu tehokkaalla virrankäytöllä
Kattavasta ominaisuudestaan huolimatta BNO055: n kompakti koko tekee siitä hyvin soveltuvan sovelluksille, joilla on rajoitetusti tilan saatavuus.Sen älykäs virranhallinta moduloi toimintaa tehokkaasti tehospektrien välillä helpottaen sen integrointia erilaisiin elektronisiin ekosysteemeihin.
Monipuolinen jännitteen yhteensopivuus
BNO055: n monimuotoisten jännitteiden majoitus mahdollistaa sen sovelluksen monissa asetuksissa.Tämä sopeutumiskyky on arvostettu skenaarioissa, joissa on monipuolinen virtalähde.Monet hyödyntävät tätä ominaisuutta suunnitellessaan järjestelmiä, jotka vaativat sekä energiatehokkuutta että korkeaa suorituskykyä, saavuttaen sujuvan integraation lukuisissa alustoissa.
BNO055: n sovellukset
Hienostuneet navigointikehykset
BNO055-anturi on integroitu innokkaasti monimutkaisisiin navigointikehyksiin, joissa sen kyky tarjota tarkka suuntaus ja liikkeen seuranta sytyttää edistymisen huippuluokan asetuksissa.Nämä ominaisuudet ovat tärkeä voimavara järjestelmien kehittämiselle, mikä parantaa suorituskykyä erityisesti miehittämättömille ja autonomisille ajoneuvoille tyypillisissä dynaamisissa ympäristöissä.
Uraauurtava robotiikka
Robotti -edistyksessä BNO055 -anturilla on rooli tarkan koordinaation ja vivahteisen liikkeen saavuttamisessa.Auttaakseen alueellisessa tietoisuudessa ja päätöksentekoprosesseissa, anturi tukee robotteja, jotka suorittavat kunnianhimoisia tehtäviä, kuten esineiden manipulointia ja esteiden kiertämistä.Todisteet järjestelmän kehityksen aikana osoittavat, että BNO055: llä robotit saavuttavat neste- ja reagoivampia toimia, mikä parantaa niiden tehokkuutta eksponentiaalisesti.
Tarkkuusterveyden seuranta
Terveydenhuollon innovaatiot hyödyntävät BNO055: tä taitostaan yksityiskohtaisten kehon liikkeen mittareiden sieppaamiseksi.Tämä anturi parantaa puettavia terveyslaitteita mahdollistamalla fyysisen aktiivisuuden ja asennon seurannan, mikä tukee sekä kliinistä hoitoa että yksilöllistä hyvinvointia.Tarjoamalla jatkuvasti tarkkoja tietoja nämä laitteet helpottavat tietoisia terveyspäätöksiä.Kehityksestä saadut vivahteelliset näkemykset korostavat tietojen tarkkuuden merkitystä ennakoivien terveydenhuollon hallintastrategioiden parantamisessa.
Lisätyn todellisuuden alustat
BNO055 rikastuttaa lisätyn todellisuuden (AR) alustoja mahdollistamalla digitaalisten esineiden tarkan päällekkäisyyden tarjoamalla kiehtovan kokemuksen.Sen edistynyt liikkeenseuranta varmistaa virtuaalisen sisällön sujuvan ja realistisen integroinnin, lisääntymisen sitoutumisen ja vuorovaikutuksen.Sektoritrendien näkemykset korostavat anturien, kuten BNO055: n, roolia AR: n käyttöönotossa lisääntyneen interaktiivisuuden ja upottamisen vuoksi.
Vertailu BNO055: n ja BNO085: n välillä
BNO055 ja BNO085 on laajalti kunnioitettu yksityiskohtaisten vektoritietojen tuottamiseksi kiihtyvyydestä, kulmanopeudesta ja magneettikentästä.Nämä kyvyt tukevat erilaisia sovelluksia, elektroniikasta teollisuusjärjestelmiin, mutta niiden erilaiset piirteet vaikuttavat suorituskykyyn erilaisissa tilanteissa.BNO085 erottaa itsensä anturifuusion ja tietojenkäsittelyn parannuksilla, jotka sisältävät edistyneen havaitsemis- ja optimointiominaisuudet.Nämä tarkennukset tekevät siitä tehokkaan dynaamisissa ympäristöissä, joissa toivotaan nopeaa reaktiivisuutta ja tarkkuutta.Esimerkiksi anturin kyky sopeutua äkillisiin muutoksiin liikkumisessa on samanlainen kuin vaistomaista tapaa, jolla voi siirtää painoaan navigoitumalla epätasaisia perusteita.BNO085: n hienostuneet algoritmit toimivat arvokkaana oppaana autonomisissa ajoneuvoissa, jatkuvasti uudelleenkalibroimalla polun valinnat vaihtelevien liikenneolosuhteiden keskellä, mikä osoittaa, että hyvin valittu anturilla on vaikutukset sovellusten järjestelmän tehokkuuden parantamiseen.
Vaikka BNO055: tä käytetään usein vakaissa ympäristöissä, sen toiminta monimutkaisissa skenaarioissa vaatii usein lisätoimenpiteitä tai lisäohjelmistoja vastaamaan BNO085: n luonnollisesti tarjoamista suorituskykyä.Esimerkiksi puettavissa olevassa laitteessa, joka luo henkilökohtaisia liikuntajärjestelmiä liikeanalyysin perusteella, BNO085: n tarkkuus ja sopeutumiskyky vähentyneen latenssin ja parannetun palautteen avulla.Sekä BNO055 että BNO085 tarjoavat huomattavia etuja anturitekniikassa.Niiden välistä päätöstä on ohjattava perusteellisesti heidän ainutlaatuisista piirteistään ja tietyn sovelluksen vaatimuksista.
BNO055 Valmistajatiedot
Robert Bosch GmbH: n segmentti Bosch Sensortecc on erikoistunut edistyneiden MEMS-pohjaisten anturi ratkaisujen kehittämiseen.Nämä anturit muodostavat älypuhelimien, pukeutuvien ja IoT -laitteiden parantamisen kallion, mikä antaa heille mahdollisuuden tuntua innokkaasti ja olla vuorovaikutuksessa ympäristönsä kanssa.Vuosien varrella Bosch Sensortec on edistänyt innovaatioita, edistäen jatkuvasti anturitekniikan ja elektroniikan sekoitusta.MEMS -tekniikka alkoi erikoistuneena kentällä, mutta sen muutos on dramaattisesti muuttanut modernia elektroniikkaa.Kun Bosch Sensortec johtaa varausta, nämä kehitykset ovat tuottaneet dynaamisia ratkaisuja, jotka parantavat laitteen suorituskykyä.MEMS-anturien monimutkainen rakenne edistää energiatehokasta toiminnallisuutta.Bosch Sensorteces esittelee johtajuutta MEMS-pohjaisessa anturiinnovaatiossa läpimurtoilla, jotka muuttavat sitä, kuinka laitteet ovat vuorovaikutuksessa ympäristössään.Jatkuva pyrkimys venyttää tekniikan rajoja korostaa anturien mahdollisuutta miehittää yhä keskeisempi sijainti digitaalisessa maisemassa.
Tietotarvikkeet PDF
BNO055 Tietotapaukset:
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.
Usein Kysytyt Kysymykset [FAQ]
1. Mitkä ovat BNO055: n toimintaperiaatteet?
BNO055 toimii harmonisoimalla triaksiaalisten kiihtyvyysmittarien, gyroskoopien ja magnetometrien tuloja, mikä mahdollistaa liikkumisen jatkuvan havainnon ja magneettisten vaikutusten.Tämä synkronointi ilmentää anturifuusion ydinkonseptia tarjoamalla johdonmukaista ja luotettavaa tietoa.Käytännöllisissä sovelluksissa BNO055: n parannettua liikkeen havaitsemista käyttäviä järjestelmiä, jotka voidaan integroida vaivattomasti eri kenttiin, kuten virtuaalitodellisuusrajapintoihin ja robottinavigointijärjestelmiin.
2. Voitteko kuvata Adafruit BNO055?
Adafruit BNO055 yksinkertaistaa anturien integraatiota tarjoamalla luontaisen anturifuusion tarjoamalla luotettavia suuntautumistietoja nopeasti ilman monimutkaista algoritmin kehitystä.Tämä osoittautuu erityisen hyödylliseksi nopeaan prototyyppiin ja integrointiin skenaarioissa, kuten koulutusprojekteissa tai kehitysympäristöissä.Tämän anturin käyttäminen hankkeissa voi erityisesti vähentää kehitysaikatauluja lievittämällä anturin kalibrointiin ja tietojenkäsittelyyn liittyviä tyypillisiä haasteita.
3. Kuinka absoluuttinen orientaatioanturi on karakterisoitu?
Absoluuttinen suunta -anturi syntetisoi tehokkaasti magnetometrin ja kiihtyvyysanturin tuloja potentiaalisilla gyroskooppikohtauksilla eristettyjen painovoimavektorien tarkkaan laskemiseksi.Tämä toiminto helpottaa yksityiskohtaista liikelianalyysiä alueilla, jotka vaativat suurta tarkkuutta, kuten ilmailu- tai edistyneitä ajoneuvojärjestelmiä.Toimittamalla vakaata ja tarkkaa tietoa nämä anturit tukevat luotettavia suuntautumislukemia, mikä mahdollistaa järjestelmien laatimisen, jotka vaativat huolellista liikkeen seurantaa ja säätelyä.

PN2222 vs. 2N2222: Tutkitaan niiden vaihdettavuutta ja eroja
12.11.2024
USB3300 -lähetin -vastaanotin: Tietokone, pinout ja tekniset tiedot
12.11.2024
Suositut viestit
-
Mikä on GND piirissä?
01.01.1970 3168
-

RJ-45 Connector Guide: RJ-45 -liitin värikoodit, kytkentäjärjestelmät, R-J45-sovellukset, RJ-45
01.01.1970 2739
-
Virtalähteen jännitteiden ymmärtäminen Electronics VCC: ssä, VDD: ssä, VEE: ssä, VSS: ssä ja GND: ssä
17.11.0400 2360
-

Kuituliitintyypit: SC vs LC ja LC vs MTP
01.01.1970 2214
-

Vertailu DB9: n ja RS232: n välillä
01.01.1970 1834
-

Mikä on LR44 -akku?
Sähkö, joka kaikkialla läsnä oleva voima, läpäisee hiljaa jokapäiväisen elämämme kaikki osat, triviaalisista välineistä hengenvaarallisiin lääketieteellisiin laitteisiin, sillä on hiljainen rooli.Tämän energian todella tarttuminen, etenkin sen tallentaminen ja tehokkaasti tuottaminen, ei kuitenkaan ole helppoa.Tätä taustaa vasten tämä artikkeli keskittyy tyyppiseen kolikkikenn...01.01.1970 1806
-
Perusteiden ymmärtäminen: induktanssiresistenssi ja kappaus
Sähkötekniikan monimutkaisessa tanssissa peruselementtien kolmikko on keskipiste: induktanssi, vastus ja kapasitanssi.Jokaisella on ainutlaatuiset piirteet, jotka määräävät elektronisten piirejen dynaamiset rytmit.Täällä aloitamme matkan näiden komponenttien monimutkaisuuden purkamiseksi, paljastamaan niiden erilliset roolit ja käytännölliset käytöt laajassa sähköorkesterissa.Ind...01.01.1970 1759
-

CR2430 Akun kattava opas: Tekniset tiedot, sovellukset ja vertailu CR2032 -akkuihin
Mikä on CR2430 -akku?CR2430 -paristojen edutNormiCR2430 -akkosovelluksetCR2430 EquivalentCR2430 vs CR2032Akku CR2430 -kokoMitä etsiä ostaessasi CR2430 ja vastaaviaTietolomake PDFUsein kysyttyjä kysymyksiä Paristot ovat pienten elektronisten laitteiden sydän.Monien käytettävissä olevien tyyppien joukossa kolikkosoluilla on ratkaiseva rooli, jota yleisesti löytyy laskimissa, kaukosäätimi...01.01.1970 1725
-
Mikä on RF ja miksi käytämme sitä?
Radiotaajuus (RF) -tekniikka on keskeinen osa modernin langattoman viestinnän, mikä mahdollistaa tiedonsiirron pitkillä etäisyyksillä ilman fyysisiä yhteyksiä.Tämä artikkeli perustuu RF: n perusteisiin selittäen, kuinka sähkömagneettinen säteily (EMR) mahdollistaa RF -viestintä.Tutkimme EMR: n periaatteita, RF-signaalien luomista ja hallintaa sekä niiden laajaa käyttöä.Artikkeli ...01.01.1970 1713
-
Kattava opas HFE: lle transistoreissa
Transistorit ovat tärkeitä komponentteja nykyaikaisissa elektronisissa laitteissa, mikä mahdollistaa signaalin monistumisen ja ohjauksen.Tämä artikkeli pohtii HFE: tä ympäröivää tietoa, mukaan lukien kuinka valita transistorin HFE -arvo, HFE: n löytäminen ja erityyppisten transistorien hyöty.Tutkimalla HFE: tä, saamme syvemmän käsityksen transistorien toiminnasta ja niiden roolista...17.11.5600 1683
Kuuma osanumero
-

C1005C0G2A101J050BA
TDK Corporation
CAP CER 100PF 100V C0G 0402
1808SC102KATRE
KYOCERA AVX
CAP CER 1000PF 1.5KV X7R 1808
XA3S400-4PQG208Q
AMD
IC FPGA 141 I/O 208QFP
OP490GP
Analog Devices Inc.
IC OPAMP GP 20KHZ QUAD 14DIP
EPM240T100C4N
Intel
IC CPLD 192MC 4.7NS 100TQFP
MPS750
onsemi
TRANS PNP 40V 2A TO92
ISL6615AIBZ-T
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 8SOIC
S9S12G64AVLFR
NXP USA Inc.
IC MCU 16BIT 64KB FLASH 48LQFP
1SMB8.5AT3G
Littelfuse Inc.
TVS DIODE 8.5VWM 14.4VC SMB
LMR33630APCQRNXRQ1
Texas Instruments
IC REG BUCK ADJ 3A 12VQFN
74HCT00D
Toshiba Semiconductor and Storage
IC GATE NAND 4CH 2-INP 14SOIC
10029364-001TRLF
Amphenol ICC (FCI)
CONN SATA RCPT 22POS SLD R/A SMD
NRF52840-CKAA-R
Nordic Semiconductor ASA
BLUETOOTH 5 SOC BLUETOOTH 5/BLUE
C2012C0G1H153J085AA
TDK Corporation
CAP CER 0.015UF 50V C0G 0805
CDC303NS
Texas Instruments
ANALOG COMPUTER SYSTEMS
1SMC33AT3
onsemi
TVS DIODE 33V 53.3V SMC
CC0201JRNPO8BN470
YAGEO
CAP CER 47PF 25V C0G/NPO 0201
TPS2H000BQPWPRQ1
Texas Instruments
IC PWR SWTCH N-CHAN 1:1 16HTSSOP -

C3225X6S1V685K250AC
TDK Corporation
CAP CER 6.8UF 35V X6S 1210
AD8630ARUZ
Analog Devices Inc.
IC OPAMP ZER-DRIFT 4CIRC 14TSSOP
EP20K300EFC672-1X
Intel
IC FPGA 408 I/O 672FBGA
DPF60C300HB
IXYS
DIODE ARRAY GP 300V 30A TO247AD
D1213A-02SO-7
Diodes Incorporated
TVS DIODE 3.3VWM 10VC SOT26
12102C103KAT4A
KYOCERA AVX
CAP CER 10000PF 200V X7R 1210
SPD07N60C3
Infineon Technologies
MOSFET N-CH 600V 7.3A TO252-3
NCP81106MNTXG
onsemi
IC REG BUCK CTLR 40QFN
V375C3V3C75BG
Vicor Corporation
DC DC CONVERTER 3.3V 75W
AX250-1PQ208
Microsemi Corporation
IC FPGA 115 I/O 208QFP
LM2506SQ
Texas Instruments
LINE TRANSCEIVER, 1 FUNC
BA17805T
Rohm Semiconductor
IC REG LINEAR 5V 1A TO220FP
XTR115UA
Texas Instruments
IC CURRENT TRANSMITTER 8SOIC
MIC5201-4.8YS
Microchip Technology
IC REG LIN 4.8V 200MA SOT223-3
12061C393KAT4A
KYOCERA AVX
CAP CER 0.039UF 100V X7R 1206
AP2401B34DNTR-G1
Diodes Incorporated
IC PWR SWITCH P-CHAN 1:1 6UDFN
XCVU095-2FFVB1760I
AMD
IC FPGA 702 I/O 1760FCBGA
M-FIAM9MN1
Vicor Corporation
INPUT ATTENUATOR MODULE -

74LVTH16652MTDX
onsemi
IC TXRX NON-INVERT 3.6V 56TSSOP
CBL2012T470M
Taiyo Yuden
FIXED IND 47UH 140MA 5.46OHM SMD
STTH16R04CT
STMicroelectronics
DIODE ARRAY GP 400V 8A TO220AB
STP110N10F7
STMicroelectronics
MOSFET N CH 100V 110A TO-220
M24C02-RMN6P
STMicroelectronics
IC EEPROM 2KBIT I2C 400KHZ 8SOIC
LMC6572BIN
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8MDIP
PPS-125-24
MEAN WELL USA Inc.
AC/DC CONVERTER 24V 101W
STM32F091CCU6TR
STMicroelectronics
IC MCU 32BIT 256KB FLSH 48UFQFPN
CAT28C64BWI-12T
onsemi
IC EEPROM 64KBIT PARALLEL 28SOIC
A2425E-10
Sensata-Crydom
SSR RELAY SPST-NO 25A 24-280V
1808SC222KAT9A
KYOCERA AVX
CAP CER 2200PF 1.5KV X7R 1808
MLG0603P3N0ST000
TDK Corporation
FIXED IND 3NH 450MA 200 MOHM SMD
12103A821JAT2A
KYOCERA AVX
CAP CER 820PF 25V NP0 1210
LTC3639EMSE#TRPBF
Analog Devices Inc.
IC REG BUCK ADJ 100MA 16MSOP
SN74ABTH245DWR
Texas Instruments
IC TXRX NON-INVERT 5.5V 20SOIC
MIC5255-2.85YM5
Micrel Inc.
IC REG LINEAR 150MA LOW NOISE
594D686X9025R2T
Vishay Sprague
CAP TANT 68UF 10% 25V 2824
VI-2WL-EV
Vicor Corporation
DC DC CONVERTER 28V 150W